Laboratory 11
Calcolo numerico per la generazione di immagini fotorealistiche
Maurizio Tomasi maurizio.tomasi@unimi.it
Implementing the Path Tracer
What have we learned
Today we will finally implement our path tracer, which concludes the discussion on the rendering equation
Even though there are still two weeks until the end of the course, we can already evaluate what we should have learned from the course
Let’s do it with a question…
What bugs do you expect today?
Work Methodology
We have always implemented one feature at a time (saving images, tone mapping, projections…)
For each feature, we implemented a series of tests
This is why every week we had the confidence that when we relied on code written in previous weeks, it was probably “correct”
It is impossible to write code as long as the one you produced so far without proceeding this way
This is the most important lesson provided by this course!
Example: intersection tests in Lobester

Example: intersection tests in Lobester

Orthonormal Bases (ONB)
Creating ONBs
It is convenient to use the algorithm from Duff et al. 2017:
def create_onb_from_z(normal: Normal) -> Tuple[Vec, Vec, Vec]: # In Python there isn't a `copysign` function 🙁 sign = 1.0 if (normal.z > 0.0) else -1.0 a = -1.0 / (sign + normal.z) b = normal.x * normal.y * a e1 = Vec(1.0 + sign * normal.x * normal.x * a, sign * b, -sign * normal.x) e2 = Vec(b, sign + normal.y * normal.y * a, -normal.y) return e1, e2, Vec(normal.x, normal.y, normal.z)When calling this function, pay close attention to the fact that the
normalparameter must already be normalized!
Testing
To verify the correct operation of
create_onb_from_z, we can use random testing (an idea apparently originating in the world of the Haskell language, see quickcheck).The idea is to generate a large number of random vectors, pass them as parameters to
create_onb_from_z, and verify that the return type is indeed an ONB. (Apparently Duff et al. discovered the bug in the algorithm from Frisvad, 2012 this way).The general approach of random testing is to generate random inputs and verify that the outputs satisfy certain properties. It is especially convenient for mathematical functions, but it is not always the best solution.
Random testing in pytracer
pcg = PCG() # Use the default seed, so if the test fails you can debug it
expected_zero, expected_one = pytest.approx(0.0), pytest.approx(1.0)
# As Python is slow, we just test 100 times the function. You can use
# larger numbers, as far as the time required to run the test is kept short
for i in range(100):
# We could use a fancier code that samples uniformly over the 4π sphere…
normal = Vec(*[pcg.random_float() for i in range(3)]).normalize()
e1, e2, e3 = create_onb_from_z(normal)
# Verify that the z axis is aligned with the normal
assert e3.is_close(normal)
# Verify that the base is orthogonal
assert expected_zero == e1.dot(e2)
assert expected_zero == e2.dot(e3)
assert expected_zero == e3.dot(e1)
# Verify that each component is normalized
assert expected_one == e1.squared_norm()
assert expected_one == e2.squared_norm()
assert expected_one == e3.squared_norm()
# You could also check that e₁×e₂=e₃, e₂×e₃=e₁, e₃×e₁=e₂Importance sampling
Implementation
We anticipated that our path tracer will use the Monte Carlo method to estimate the integral of the rendering equation:
\int_{2\pi} f_r(x, \Psi \rightarrow \Theta)\,L(x \leftarrow \Psi)\,\cos\theta\,\mathrm{d}\omega_\Psi.
To improve variance we will use importance sampling, employing the PDF
p(\omega) \propto f_r \cdot \cos\theta.
The BRDF Type
We therefore need to add a method that applies to the types derived from
BRDFand that has this signature:Each type derived from
BRDF(e.g.,DiffuseBRDF,SpecularBRDF, etc.) will have to redefinescatter_ray.
DiffuseBRDF
For the diffuse BRDF, we deduced that p(\omega) \propto \cos\theta.
The implementation of
DiffuseBRDF.scatter_raymust therefore use the algorithm we derived for the Phong distribution with n = 1:def scatter_ray(self, pcg: PCG, incoming_dir: Vec, interaction_point: Point, normal: Normal, depth: int) -> Ray: e1, e2, e3 = create_onb_from_z(normal) cos_theta_sq = pcg.random_float() cos_theta, sin_theta = sqrt(cos_theta_sq), sqrt(1.0 - cos_theta_sq) phi = 2.0 * pi * pcg.random_float() return Ray(origin=interaction_point, dir=e1 * cos(phi) * sin_theta + e2 * sin(phi) * sin_theta + e3 * cos_theta, tmin=1.0e-3, # Be generous here tmax=inf, depth=depth)
SpecularBRDF
Ray generation for the specular BRDF is perfectly deterministic, and there is no \cos\theta term to weight the ray’s contribution.
The implementation of
SpecularBRDF.scatter_rayis therefore particularly simple:def scatter_ray(self, pcg: PCG, incoming_dir: Vec, interaction_point: Point, normal: Normal, depth: int) -> Ray: ray_dir = Vec(incoming_dir.x, incoming_dir.y, incoming_dir.z).normalize() normal = normal.to_vec().normalize() return Ray(origin=interaction_point, dir=ray_dir - normal * 2 * normal.dot(ray_dir), tmin=1e-3, tmax=inf, depth=depth)
Path tracing
The PathTracer Type
We have defined two renderers so far:
OnOffRendererandFlatRenderer. Today we implementPathTracer.The constructor parameters are as follows:
- The
Worldobject to render; - The background color, used for those directions along which there are no intersections;
- The random number generator to use (
PCGtype); - Number of rays to generate for the integral calculation;
- Maximum ray depth;
- Depth limit beyond which to use Russian Roulette.
- The
Implementation
def __call__(self, ray: Ray) -> Color:
return Color(0.0, 0.0, 0.0) if ray.depth > self.max_depth
hit_record = self.world.ray_intersection(ray)
return self.background_color if not hit_record
hit_material = hit_record.material
hit_color = hit_material.brdf.pigment.get_color(hit_record.surface_point)
emitted_radiance = hit_material.emitted_radiance.get_color(hit_record.surface_point)
hit_color_lum = max(hit_color.r, hit_color.g, hit_color.b)
if ray.depth >= self.russian_roulette_limit: # Russian roulette
q = max(0.05, 1 - hit_color_lum)
if self.pcg.random_float() > q:
# Keep the recursion going, but compensate for other potentially discarded rays
hit_color *= 1.0 / (1.0 - q)
else:
# Terminate prematurely
return emitted_radiance
# Monte Carlo integration
cum_radiance = Color(0.0, 0.0, 0.0)
# Only do costly recursions if it's worth it
if hit_color_lum > 0.0:
for ray_index in range(self.num_of_rays):
new_ray = hit_material.brdf.scatter_ray(
pcg=self.pcg,
incoming_dir=hit_record.ray.dir,
interaction_point=hit_record.world_point,
normal=hit_record.normal,
depth=ray.depth + 1,
)
new_radiance = self(new_ray) # Recursive call
cum_radiance += hit_color * new_radiance
return emitted_radiance + cum_radiance * (1.0 / self.num_of_rays)Test
A simple method to verify the functioning of a path tracer is the so-called furnace test.
It consists of casting a ray inside an arbitrarily shaped object with diffuse BRDF and constant luminosity L_e and reflectance \rho_d.
The generic ray will follow a path trapped within the object, and thus each ray will keep hitting the same sphere over and over again. This is a situation where the rendering equation can be solved analytically.

\begin{aligned} L &= L_e + \rho_d \Bigl(L_e + \rho_d \bigl(L_e + \rho_d(L_e + \dots)\bigr)\Bigr) =\\ &= L_e + \rho_d L_e + \rho_d^2 L_e + \rho_d^3 L_e + \ldots =\\ &= L_e \bigl(1 + \rho_d + \rho_d^2 + \rho_d^3 + \ldots \bigr) =\\ &= L_e \sum_{n=0}^\infty \rho_d^n =\\ &= \frac{L_e}{1 - \rho_d}. \end{aligned}
Tests in Pytracer
The pytracer code implements the test
testFurnacewhich uses these assumptions:- Creates a sphere centered at the origin;
- Casts a ray starting from the center of the sphere;
- Invokes
PathTracersettingmax_depth=100and ensuring that the Russian roulette algorithm is not used; - Verifies that the returned radiance corresponds to L_e / (1 - \rho_d).
The test is repeated a number of times using random values of L_e and \rho_d (avoiding choosing \rho_d \approx 1!).
pcg = PCG()
# Run the furnace test several times using random values for L_e and ρ_d
for i in range(5):
emitted_radiance = pcg.random_float()
reflectance = pcg.random_float() * 0.9 # Avoid numbers that are too close to 1
world = World()
enclosure_material = Material(
brdf=DiffuseBRDF(pigment=UniformPigment(Color(1.0, 1.0, 1.0) * reflectance)),
emitted_radiance=UniformPigment(Color(1.0, 1.0, 1.0) * emitted_radiance),
)
world.add(Sphere(material=enclosure_material))
path_tracer = PathTracer(pcg=pcg, num_of_rays=1, world=world, max_depth=100, russian_roulette_limit=101)
ray = Ray(origin=Point(0, 0, 0), dir=Vec(1, 0, 0))
color = path_tracer(ray)
expected = emitted_radiance / (1.0 - reflectance)
assert pytest.approx(expected, 1e-3) == color.r
assert pytest.approx(expected, 1e-3) == color.g
assert pytest.approx(expected, 1e-3) == color.bThe main Method
Now that we have a path tracer, it’s good to modify our
democommand so that it creates an image that better highlights how the algorithm works.You can define any scene you like, using the shapes you have implemented in your code (spheres, planes, triangles, CSG, etc.).
The important thing is that you define a large diffuse surface (a plane or a large radius sphere), which acts as a light source and therefore has a non-negligible L_e component.
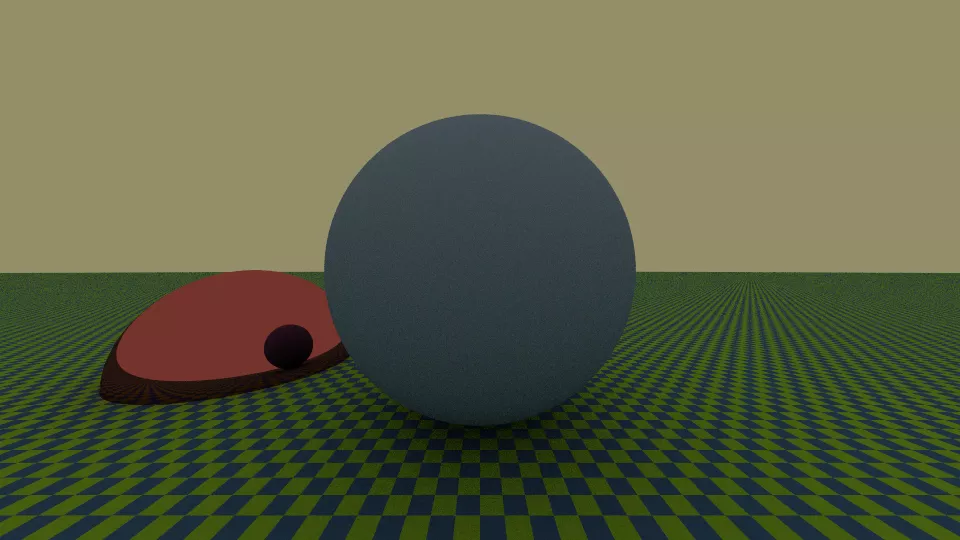
In pytracer I defined a plane for the ground, a sphere for the sky, and two spheres in the foreground: the first has a diffuse BRDF, the second a reflective BRDF.
Random Numbers
Make sure that the two numbers that initialize the
PCGgenerator can be passed from the command line.The most important number is
init_seq, because it uniquely identifies the sequence of numbers generated by thePCG, and therefore allows the production of completely decorrelated images (which can then be averaged together without producing bias).Averaging different images (produced concurrently using GNU Parallel) is a good way to reduce variance without increasing the actual computation time (wall-clock time).
Profiling
Profiling
From today, your code will have to do a lot of calculations!
Compare the code speeds of different groups in generating similar images, to understand if there are bottlenecks: with the languages you use, in theory there shouldn’t be significant differences.
If you notice differences, you need to measure which part of the code is slowing it down: this is what is called profiling.
Performance Measurement
It is not enough to know how long your entire code takes to produce an image: you need to know how much time it spends in each function.
There are various ways to measure it, and many tools available: it’s impossible to be exhaustive!
I’ll list some possibilities, and offer some tips and tricks.
Types of Profilers
The simplest method is to surround the functions «suspected» of being bottlenecks with time measurements:
There are profilers that measure the cumulative time spent by each line of code: be careful, because they can slow down the code a lot!
Statistical profilers are also available, which are less accurate but do not significantly slow down the code.
Outsmarting the compiler
Modern compilers are so smart that they can make benchmark results worthless.
For instance, the following code will likely report that the cross product of two vectors takes no time to run:
Tips (1/4)
Never test mathematical functions on variables set to zero, as compilers usually optimize these calls out
If you initialize your variables to random numbers, be sure not to include random number generator in the profiling! Good practice: initialize a vector of random numbers before the test:
Tips (2/4)
Other stuff might happen while your benchmark code is running:
- If you are using a Just-in-time (JIT) compiler (Julia, C#, Java, etc.), the first time you call a function it needs to be compiled/optimized
- Your language might perform garbage collection (C#, Julia, Go, D, etc.);
- Your system might dynamically adjust CPU frequency to optimize power drain;
- Other processes (OS updater, email client) might run in the background;
- Etc.
It might be that you are measuring the time spent to run your program and to do something else.
Tips (3/4)
It’s a good idea to run a benchmark a few times (3? 5?) and then consider the minimum time alongside other statistical parameters (average, median, etc.).
![]()
Many benchmark libraries provide detailed statistics and consider JIT warm-up times and other nuisances: Google Benchmark (C++), BenchmarkTools.jl (Julia), BenchmarkDotNet (C#, F#), etc.

Tips (4/4)
Don’t measure the time of every function, just focus on the ones that could be problematic. (For example, it doesn’t matter if the function that interprets the command line is fast!)
Often the output of profilers is quite unreadable and too detailed: however, there are tools to extract summary graphs such as flamegraphs, which are easier to read.
The speedscope site provides a way to produce navigable flamegraphs through a browser, starting from the output of various profilers, and does not require installation.
What to do today
What to do today
- Continue working in the
pathtracingbranch; - Implement a function to create an orthonormal basis starting from a
normal vector (if in your language it is not easy to return three return
values, implement a new
ONBtype); - Implement the
scatter_raymethod that works on BRDF types, and implement the specular BRDF; - Implement the path tracing algorithm;
- Modify the demo so that it has a diffuse sky capable of illuminating the scene.
- After merging, release version
0.3.0and update theCHANGELOG.mdfile.
Optional Additions
- Antialiasing (see PR#13 of pytracer);
- Point-light tracing, a.k.a. Whitted algorithm (see PR#14 of pytracer).