Lesson 11
Calcolo numerico per la generazione di immagini fotorealistiche
Maurizio Tomasi maurizio.tomasi@unimi.it
MC and Path Tracing
MC Integration
In the last lecture we introduced Monte Carlo methods to estimate the integral in the rendering equation:
\begin{aligned} L(x \rightarrow \Theta) = &L_e(x \rightarrow \Theta) +\\ &\int_{2\pi} f_r(x, \Psi \rightarrow \Theta)\,L(x \leftarrow \Psi)\,\cos(N_x, \Psi)\,\mathrm{d}\omega_\Psi. \end{aligned}
We said that it is possible to use the mean method, optimized via importance sampling, to estimate the integral.
Random Directions
To estimate the integral in two dimensions, we first discussed the case of the simple mean method, without using importance sampling.
In this case, the evaluation of the integral requires choosing N random directions \Psi and calculating the value of the integrand. The PDF of the directions is defined through their solid angle \omega, and we saw that
p(\omega) = \frac1{2\pi}.
However, this explains how to evaluate the integral if we already know the value of L(x \leftarrow \Psi) in the integrand, but this is not the general case!
Recursive Integral
In principle, it should not be difficult to evaluate the term L(x \leftarrow \Psi) inside the integral: just apply the rendering equation recursively.
The recursive call represents the fact that to calculate the radiance leaving a point on the surface we must know the radiance entering that point, and this leads to a chain of calculations.
As in all recursive algorithms, it is necessary to establish a stopping criterion (stopping criterion).
def radiance(self, ray: Ray, num_of_samples=100) -> Color:
hit_record = self.world.ray_intersection(ray)
material = get_material(hit_record)
emitted_radiance = material.get_emitted_radiance(hit_record.surface_point)
# Estimate the integral using Monte Carlo
cum_radiance = Color(0.0, 0.0, 0.0)
for i in range(num_of_samples):
# Create a new (secondary) ray
mc_ray = scatter_ray(..., depth=ray.depth + 1)
# To compute the radiance, we must do a recursive call! Will it ever stop?
mc_radiance = radiance(mc_ray, num_of_samples=num_of_samples)
cum_radiance += material.brdf(...) * mc_radiance
return emitted_radiance + cum_radiance * (1.0 / num_of_samples)Stopping the Recursion
The simplest criterion is to limit the number of iterations. After three or four iterations, the cycle ends:
hit_record = self.world.ray_intersection(ray) material = get_material(hit_record) emitted_radiance = material.get_emitted_radiance(hit_record.surface_point) cum_radiance = Color(0.0, 0.0, 0.0) if ray.depth < 5: # Compute the MC integral only if we have not gone too deep for i in range(num_of_samples): .... # If ray.depth > 5, then "cum_radiance" is zero return emitted_radiance + cum_radiance * (2 * pi) / num_of_samplesThis method is very effective to limit the computation time. But is it correct?
Stopping Recursion
Even though it is a widely used method, assigning a null value to radiance when
ray.depthexceeds a threshold is not physically correct!Since L(x \leftarrow \Psi) \geq 0, “truncating” the contribution of the integral after a certain number of iterations means underestimating the value of the integral: if the radiance is underestimated, a bias is introduced into the solution.
In our case, truncating the recursion will always produce a darker image.

Big Hero 6 (Walt Disney Animation Studios, 2014), 2 reflections

Big Hero 6 (Walt Disney Animation Studios, 2014), 9 reflections

Metropolis Light Transport, Veach & Guibas (1997)
Russian Roulette
A widely used algorithm in path tracing is Russian roulette, which removes the bias, i.e., the underestimation of radiance, at the cost of increasing uncorrelated (white) noise.
The procedure requires setting a probability 0 \leq q \leq 1 (in real Russian roulette, q = 1/6). This is the algorithm:
- A random number 0 \leq x \leq 1 is drawn;
- If x \leq q, the calculation is stopped and zero is returned;
- If x > q, the radiance L is calculated and L / (1 - q) is returned.
The method replaces the radiance L with a random radiance L' as follows:
L' = \begin{cases} 0&\text{if $x > q$}, \\ \frac{L}{1 - q}\ &\text{otherwise}. \end{cases}
L' has expected value
E[L'] = E\left[(1 - q) \frac{L}{1 - q} + 0\cdot q\right] = E[L].
There is a probability q of returning zero (underestimation), but if x > q (with probability 1 - q) L is overestimated, as 1 / (1 - q) > 1.
Disadvantages
Russian roulette is not a solution without flaws!
Suppose, for example, you choose q = 0.99. In this case, it will be very difficult to return L / (1 - q), because in most cases zero will simply be returned.
On the other hand, the few times that L / (1 - q) is returned, the value L multiplied by one hundred will be returned, i.e., 1 / (1 - 0.99).
Obviously, this implies a significant increase in the variance of the estimate, which means that the image will be dominated by so-called fireflies, although clearly unbiased.
Details
To implement Russian roulette, a minimum threshold is usually set for the value of
depth:if ray.depth > 2: # …or > 1 if there are no specular surfaces threshold = compute_threshold(...) # Estimate a reasonable value for "q" if pcg.random_float() > threshold: return radiance / (1 - threshold) else: return Color(0.0, 0.0, 0.0)This does not introduce a bias, but allows to reduce noise in the image.
For q, I suggest using 1 minus the maximum value among the R, G, B components of the BRDF at the intersection point.
Path Tracing in Action
We have all the theory available to implement the path tracing algorithm!
The number N of samples (directions) used to estimate each integral is a free parameter, and should be chosen depending on the scene and how efficient the path tracer is.
Assuming a threshold for
ray.depthequal to m reflections, the total number N_\text{tot} of rays that the code must simulate is \leq N^m. If you choose N = 100 and m = 9, you get N_\text{tot} = 10^{18}: it is important not to overdo it with the value of N!
N = 3

726,939 rays
N = 10

5,010,840 rays
N = 25

26,343,150 rays
N = 50

98,875,400 rays
N = 100

382,384,500 rays
Importance sampling
We implemented the code using the mean method to estimate the integral, but this is not optimal!
In the last lesson, we saw that the variance of the mean method can be reduced if we extract random samples according to a “clever” distribution p(\theta, \phi).
What distribution could be “clever” here?
Importance Sampling
Let’s write once again the integral of the rendering equation:
\int_{2\pi} f_r(x, \Psi \rightarrow \Theta)\,L(x \leftarrow \Psi)\,\cos(N_x, \Psi)\,\mathrm{d}\omega_\Psi.
Suppose we place ourselves in the reference system where \theta and \phi are measured with respect to the normal axis N_x; then the angle between N_x and \Psi is precisely \theta, and therefore
\int_{2\pi} f_r(x, \Psi \rightarrow \Theta)\,L(x \leftarrow \Psi)\,\cos\theta\,\mathrm{d}\omega_\Psi.
Possibilities
\int_{2\pi} \textcolor{#ad3434}{f_r(x, \Psi \rightarrow \Theta)}\, \textcolor{#34ad34}{L(x \leftarrow \Psi)}\, \textcolor{#3434ad}{\cos\theta}\, \mathrm{d}\omega_\Psi.
To choose a “clever” distribution, we should look for a p(x) that resembles the integrand but is at the same time easy to normalize.
There are three terms in the integrand that we need to understand how to combine into a p(\omega):
- \textcolor{#ad3434}{f_r(x, \Psi \rightarrow \Theta)};
- \textcolor{#34ad34}{L(x \leftarrow \Psi)};
- \textcolor{#3434ad}{\cos\theta}.
Implementation
One solution is to choose p(\omega) \propto \cos\theta. The intuitive sense is that it “pays” more to choose directions more aligned along the normal (i.e., with small \theta), because that’s where most of the radiance comes from.
A better solution, however, is to choose
p(\omega) \propto f_r(x, \Psi \rightarrow \Theta) \cos\theta,
because the f_r function itself can have strong dependencies on the direction, as in the case of reflective surfaces.
Diffuse BRDF
On a diffuse surface, the incident radiation is diffused over 2π, and it holds that
f_r(x, \Psi \rightarrow \Theta) = \frac{\rho_d}\pi.
Consequently, to use importance sampling, we need to find a PDF p(\omega) such that
p(\omega) \propto \frac{\rho_d}\pi\,\cos\theta \propto \cos\theta.
This result can be traced back to the Phong distribution (\propto \cos^n\theta).
In the case of a diffuse surface, it holds that
\begin{aligned} &\int_{2\pi} f_r(x, \Psi \rightarrow \Theta)\,L(x \leftarrow \Psi)\,\cos(N_x, \Psi)\,\mathrm{d}\omega_\Psi \approx\\ \approx&\frac1N\sum_{i=1}^N \frac{f_r(x, \Psi_i \rightarrow \Theta)\,L(x \leftarrow \Psi_i)\,\cos\theta}{p(\omega)} =\\ =&\frac{\rho_d}{N}\sum_{i=1}^N L(x \leftarrow \Psi_i), \end{aligned}
where, obviously, it is necessary that the \Psi_i are distributed according to p(\omega) \propto \cos\theta.
Using BRDFs
Given a certain number N of rays with which to calculate the integral, the use of importance sampling allows us to reduce the variance: for the same N, with importance sampling the image is less noisy.
Note that if we use importance sampling to evaluate the integral, it is not necessary for the code to explicitly calculate the value of f_r: this simplifies in the expression!
The price to pay is that we have to generate random directions with distributions that are generally not uniform.
Reflective BRDF
Let’s now consider the BRDF of a perfectly reflective mirror.
We already know that mirrors obey the law of reflection:
![]()
In this case, the BRDF is obviously proportional to a Dirac delta function.

Reflective BRDF
The implementation of the reflective BRDF is very simple because, in the evaluation of the integral, the secondary rays are all aligned along the direction (\theta_r, \phi_r).
From the point of view of vectors, the law of reflection is written as follows:
\vec r = 2(\hat n \cdot \Psi) \hat n - \Psi,
where \vec r is the reflected vector.
Reflective BRDF
In Geometrical Considerations and Nomenclature for Reflectance (Nicodemus, Richmond & Hsia, 1977), it is shown through energy considerations that for an ideal reflective surface, we have
f_r(x, \Psi \rightarrow \Theta) \propto \frac{\delta(\sin^2\theta_r - \sin^2\theta)\,\delta(\psi_r \pm \pi - \psi)}{\cos\theta},
where (\theta, \phi) is obviously the incoming ray direction \Psi, and (\theta_r, \psi_r) is the reflected direction.
The presence of \cos\theta in the denominator means that p(\omega) does not depend on \cos\theta: therefore, we do not have to “weight” the reflected radiance by \cos\theta.
Arbitrary Orthonormal Bases (ONB)
Random Directions in Space
To estimate the integral of the rendering equation using the mean method, we need to generate random directions with a given distribution p(\omega) over the 2π hemisphere.
However, the 2π hemisphere is defined with respect to the normal \hat n, which can have an arbitrary orientation in three-dimensional space!
While the mathematical generation of random directions is clear, from an implementation standpoint, it’s not so simple: we need to change reference frames!
Reference Frames

The expressions we derived for generating random directions according to various distributions all assume that \theta is measured starting from the z axis.
When we generate a random direction in that reference frame, we then need to convert the vector to the global system in which the “world” objects are defined.
This task is simple if we use orthonormal bases (ONBs) created ad hoc.
Orthonormal Bases
Given an orthonormal basis (ONB) \left\{\hat e_1, \hat e_2, \hat e_3\right\} and a vector \vec v, it holds that
\vec v = \sum_{i=1}^3 \left<\vec v, \hat e_i\right> \hat e_i = v_x \hat e_x + v_y \hat e_y + v_z \hat e_z.
If we have a new ONB \left\{\hat e'_1, \hat e'_2, \hat e'_3\right\}, the vector \vec v changes its representation depending on the basis, from (v_x, v_y, v_z) to (v'_x, v'_y, v'_z):
\vec v' = \sum_{i=1}^3 \left<\vec v', \hat e'_i\right> \hat e'_i = v'_x \hat e'_x + v'_y \hat e'_y + v'_z \hat e'_z = v_x \hat e_x + v_y \hat e_y + v_z \hat e_z.
Arbitrary ONBs
The simplest way to create a new ONB is based on the fact that from two elements of the basis, we can always derive the third using the cross product:
\hat e_x \times \hat e_y = \hat e_z,\quad \hat e_y \times \hat e_z = \hat e_x,\quad \hat e_z \times \hat e_x = \hat e_y.
To create an ONB, we choose an arbitrary vector \vec g, and set
\hat e'_x = \text{norm}(\hat n \times \vec g),\quad \hat e'_y = \hat n \times \hat e'_x,\quad \hat e'_z = \hat n,
where \text{norm}(\vec v) = \vec v / \left\|\vec v\right\| normalizes the length of the vector.
A Difficulty
However, the method for creating a new ONB only works as long as the arbitrary vector \vec g is not aligned with \hat n, otherwise
\hat n \times \vec g \approx 0.
Therefore, in the algorithm implementation, we need to include a test: if \hat n \approx \vec g, then we replace \vec g with another vector \vec h. Usually, we choose \vec g = (1, 0, 0) and \vec h = (0, 1, 0).
Duff et al. 2017, based on Frisvad, 2012, proposed an alternative algorithm based on quaternions that requires half the execution time (it avoids this check and the normalization).
Duff et al. (2017)
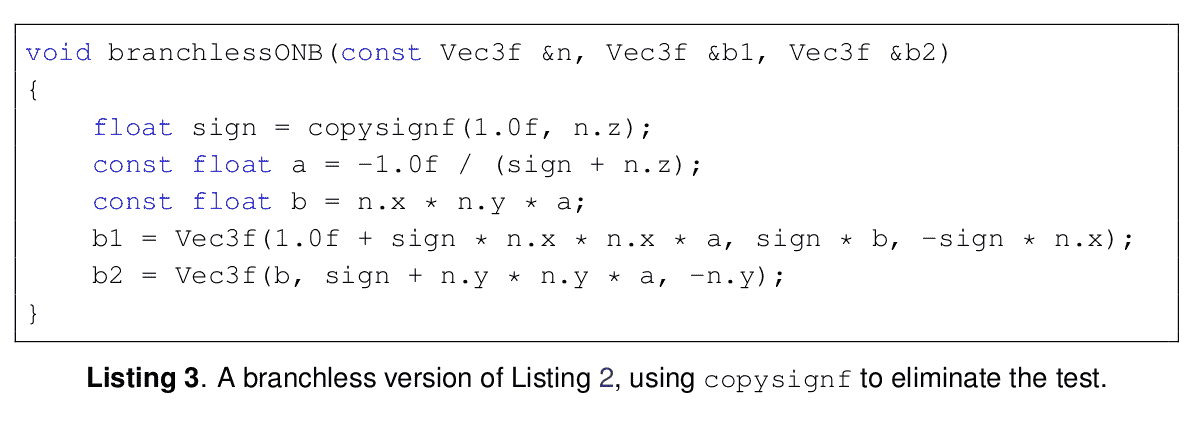
[The authors work at Pixar Animation Studios.]
Further Insights
Further Insights
- Let’s now briefly look at some possibilities for improving the path
tracing algorithm:
- Antialiasing;
- Point-light tracing (Whitted algorithm);
- Direct illumination;
- Photon mapping.
- If you wish, you can implement antialiasing and point-light tracing in your code.
- Direct illumination and photon mapping go well beyond what can be implemented for this course.
Aliasing and Antialiasing
Aliasing
In the
ImageTracertype of our ray tracer, we assumed that the color of each pixel was determined by the color of the ray passing through the center:![]()
This assumption causes the phenomenon called aliasing, caused by the finite size of the pixels, and the production of the so-called Moiré fringes

The human eye tends to notice wavy lines in the checkered pattern on the plane.
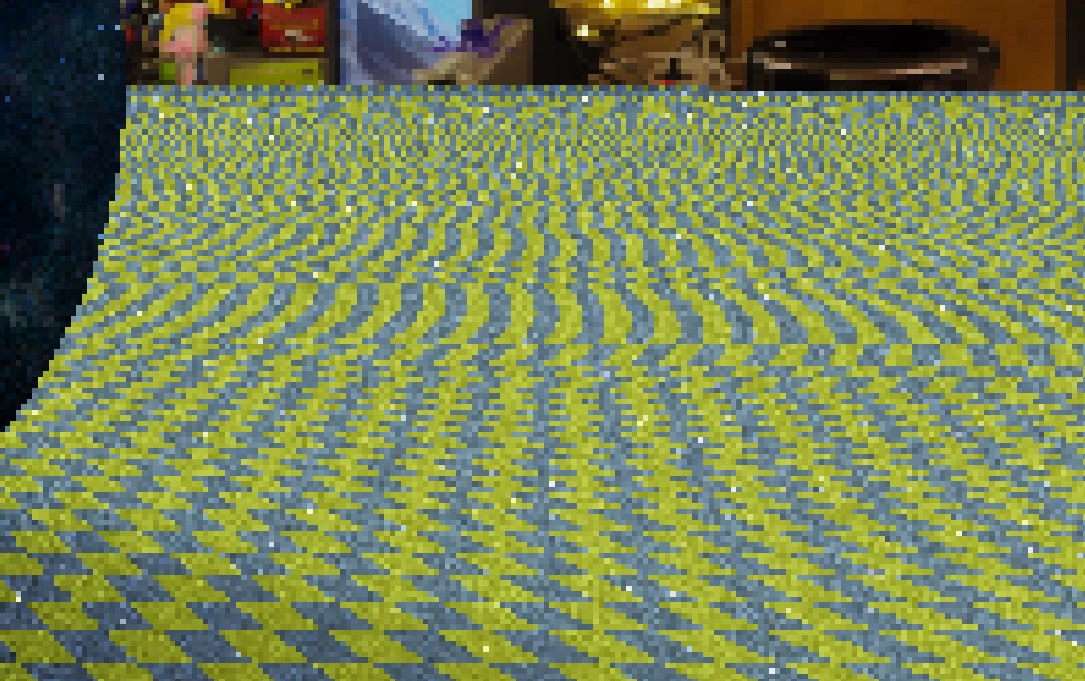
The problem with aliasing is that some pixels cover areas of the screen that contain different colors.
Antialiasing
Antialiasing refers to an algorithm that reduces artifacts in an image caused by color variations at scales smaller than a pixel.
A simple way to implement antialiasing is to give our
ImageTracertype the ability to sample a pixel using multiple rays and then calculate the average of the radiance associated with each.
Antialiasing and MC
It may not be immediately obvious, but the rays we send within the same pixel should not be evenly spaced, otherwise, the problem of Moiré fringes would still occur (albeit to a lesser extent):
![]()
It’s better to use a Monte Carlo method to sample the interior of a pixel.
Stratified Sampling
Randomly extracting points on the [0, 1] \times [0, 1] plane of a pixel is simple: just extract both u and v from a uniform distribution.
However, the result has poor variance behavior because it’s easy for some regions of the pixel to be under-sampled compared to others.
Stratified sampling is a simple method to reduce variance: the pixel space is divided into many sub-squares, and a random position is extracted within each of the squares.

Implementation
Stratified sampling is simple to implement, but it requires the number of rays to be a perfect square (1, 4, 9, …).
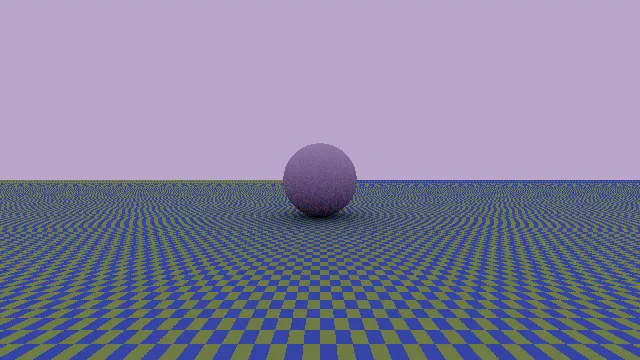
Implementing antialiasing with stratified sampling has the advantage of greatly reducing the grainy appearance of images produced with path tracing.
We have already seen that graininess can be reduced by increasing the number N of secondary rays, but the computation time is proportional to N^m, where m is the maximum recursion depth.
Using antialiasing with N rays, the computation time is only proportional to N: much better!

1 ray per pixel

4 rays per pixel

9 rays per pixel

16 rays per pixel

25 rays per pixel
Point-light tracing
Point-light tracing
A widely used algorithm for generating 3D images is what we will call point-light tracing, or Whitted algorithm. (An improved illumination model for shaded display, Whitted, 1980).
It is based on the consideration that in certain scenes most of the light energy originates from a few objects with a small apparent diameter: a lamp, the sun, etc.
If all the objects in the scene are divided into «luminous» and non-luminous, the integral of the equation can be evaluated over a reduced domain.
Light Sources
The classic point-light tracing algorithm makes these assumptions:
- Light sources are point-like and reduce to Dirac deltas.
- If a source is not luminous, it does not contribute to the overall brightness of the image.
- To compensate for the lack of radiation illuminating the parts not directly illuminated, some ray tracers arbitrarily add an «ambient light» term (a color close to black but not exactly zero).
It is not possible to model diffuse illumination, but the time required to calculate the solution is much shorter.
Implementation
In the
Worldtype, a list ofLightSourceobjects must be maintained, each of which is aPointassociated with a certain emission (Color).Image generation uses
ImageTraceras usual to project rays fromCameratoHdrImage(possibly using anti-aliasing).When a ray interacts with a surface, it is determined which
LightSourceobjects are visible and their contribution modulated by theBRDFis summed.The algorithm is very fast because it is not recursive (unless you want to implement reflective/refractive surfaces).
Considerations
In the general case, the farther a light source is, the less bright it is; its radiance is constant, but the solid angle \mathrm{d}\omega in the integral of the rendering equation scales as r^{-2}.
However, if a light source is a Dirac delta, it has no solid angle, and therefore in a point-light tracer one should compensate for this effect.
However, it is not enough to divide the contribution of a light source by r^2, because the units of measurement would not correspond!
Usually in point-light tracers this effect is ignored (see the case of POV-Ray). Alternatively, a reference dimension d can be assigned to each light source, and scaled by (d / r)^2.
Direct Illumination
Direct Illumination
We applied importance sampling to the ray tracing equation by writing a probability function
p(\omega) \propto \cos\theta \times f_r.
This trick can greatly improve the rendering quality in the case of BRDFs highly dependent on \theta, but it does not help if the term
L(x \leftarrow \Psi)
in the rendering equation integral varies greatly. To reduce variance in these cases, the (explicit) direct lighting algorithm exists.
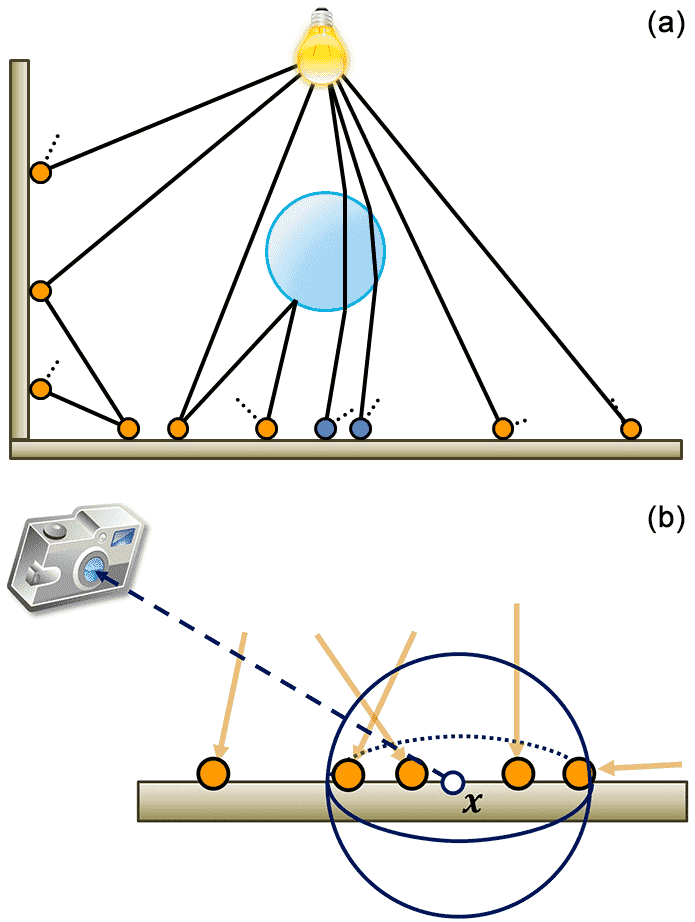
«Easy» Case
«Difficult» Case
Direct Illumination

If the p(\omega) used in importance sampling could «weigh» the presence or absence of light sources, convergence would be much faster!
Implementation
To implement such an optimization, a flag must be added to the
Materialtype, indicating whether the material is a «significant» emitter or not.When calculating the integral of the rendering equation, the 2π domain is divided into two parts:
- The solid angle \Omega_\text{lum}
subtended by those objects whose
Materialhas the «emitter» flag set totrue; - The remaining solid angle \Omega_\text{rem}.
- The solid angle \Omega_\text{lum}
subtended by those objects whose
The integral related to \Omega_\text{rem} is calculated in the usual way.
Lighting
The integral related to the solid angle \Omega_\text{lum} is calculated in a special way.
Each
Shapemust be able to calculate its own solid angle (easy for planes, spheres and triangles, difficult for CSG objects!).Furthermore, a method is needed that returns a random direction towards the emissive object, uniformly distributed within its solid angle (easy for spheres and triangles, difficult for planes and CSG objects!).
The implementation is complicated by the fact that the normalization constants for the various p(\omega) used, and the overlaps of different solid angles, must be taken into account.
Photon Mapping
Photon Mapping
Photon mapping is a technique that optimizes the computation time for the solution of the rendering equation. It is illustrated in the book Realistic Image Synthesis Using Photon Mapping (Jensen, 2009).
It is a forward ray-tracing algorithm (the only one we analyze in this course!) which is performed in two steps:
- Creation of the photon map;
- Rendering of the image.
Photon Mapping Algorithm
For each light source, a series of rays are emitted in random directions.
At each interaction with a surface, it is chosen with a certain probability whether to create a photon: this is a
Photontype that contains the position (aPoint) and its energy (i.e., aColorfield).The list of all created
Photonobjects (the photon map) is stored in theWorldtype (it is not necessary to associate aPhotonwith theShapethat produced it).To calculate L(x \leftarrow \Psi) in the rendering equation, all
Photonobjects within a certain distance d from x are considered.
Photons in the «Cornell Box»

Physically based computer graphics for realistic image formation to simulate optical measurement systems, Retzlaff et al. (2017)
Algorithm Characteristics
The calculation of photons can be reused for subsequent executions of the path tracing algorithm (possibly saving it to disk).
Searching for the photons closest to a point x can be made very fast using optimized data structures, stored directly in
World.It is easy to use it to simulate effects related to the light spectrum (prism diffraction, caustics, etc.).
Usually, photon mapping is used only to calculate the indirect light component (i.e., the light that reaches the surfaces but not the light that directly reaches the observer’s eye): for the latter, path-tracing can be used.