Lesson 7
Calcolo numerico per la generazione di immagini fotorealistiche
Maurizio Tomasi maurizio.tomasi@unimi.it
Animations
Creating animations
The mathematics of homogeneous transformations allows us to easily create static images using a matrix formalism.
What would change if we wanted to create animations instead? (We will limit ourselves to the case where we only animate transformations.)
Let’s see a practical example.
Transformations over time (1/2)
Consider a 3D object centered at the origin.
Imagine that at time t = 0 of the animation the object must be at position \vec k_0, and at time t = 1 at position \vec k_1.
If I want to generate the frame of the object at a generic time 0 \leq t \leq 1, the transformation A is trivially
A(t) = T_{\vec k_0 + (\vec k_1 - \vec k_0) t} = \begin{pmatrix} 1&0&0&k_{0x} + (k_{1x} - k_{0x})t\\ 0&1&0&k_{0y} + (k_{1y} - k_{0y})t\\ 0&0&1&k_{0z} + (k_{1z} - k_{0z})t\\ 0&0&0&1 \end{pmatrix}.
Transformations over time (2/2)
Scaling transformations are equally trivial to animate: to scale from s_0 to s_1, I can define \xi(t) = s_0 + (s_1 - s_0) t
The transformation is
A(t) = M_{s_0 + (s_1 - s_0) t} = M_{\xi(t)} = \begin{pmatrix} \xi(t)&0&0&0\\ 0&\xi(t)&0&0\\ 0&0&\xi(t)&0\\ 0&0&0&1 \end{pmatrix}.
Animating rotations
Rotations are represented through orthogonal matrices (R(t) R(t)^t = I).
We cannot simply interpolate the coefficients of two rotation matrices representing rotations around two arbitrary axes \vec a_1 and \vec a_2 R(0) = \begin{pmatrix} m_{11}&m_{12}&m_{13}\\ m_{21}&m_{22}&m_{23}\\ m_{31}&m_{32}&m_{33} \end{pmatrix},\ % R(1) = \begin{pmatrix} m'_{11}&m'_{12}&m'_{13}\\ m'_{21}&m'_{22}&m'_{23}\\ m'_{31}&m'_{32}&m'_{33} \end{pmatrix},\quad with the usual formula m_{ij} + \bigl(m'_{ij} - m_{ij}\bigr) t: the resulting R(t) is not orthogonal!
Example
Example
The Planck satellite had a star tracker on board that identified the satellite’s orientation with respect to the fixed stars.
The orientation (attitude) was measured 10 times per second (the scientific data were sampled ~100 times per second) and transmitted to the ground station:
![]()
On the ground, the orientation is needed at the same sampling rate as the scientific data, so interpolation is necessary.
To do this, the Planck data reduction pipeline used quaternions.

Complex Numbers and Quaternions
Complex Numbers and Quaternions
We have already expressed rotations in matrix form.
It is also possible to express rotations using complex numbers (in 2D) or quaternions (in 3D).
Quaternions have many advantages over 3D rotation matrices and are used in many fields.
If you want to learn more, two excellent texts are Visualizing quaternions (A. J. Hanson) and Quaternions for computer graphics (J. A. Vince).
Complex Numbers
The algebra ℂ of complex numbers contains elements z = (\Re z, \Im z) = (x, y).
The product is defined as
z_1 \cdot z_2 = (\Re z_1\,\Re z_2 - \Im z_1\,\Im z_2, \Re z_1\,\Im z_2 + \Im z_1\,\Re z_2).
Introducing i such that i^2 = -1 and writing complex numbers in the form z = x + i y, the product formula is easier to remember:
(x_1 + i y_1) \cdot (x_2 + i y_2) = x_1 x_2 - y_1 y_2 + i \bigl(x_1 y_2 + x_2 y_1\bigr).
Rotations and Complex Numbers
In the plane, it is possible to encode a rotation R(\theta) around the origin using the complex number
r(\theta) = e^{i \theta} = \cos\theta + i\sin\theta
if the vector \vec{v} = x \hat e_x + y \hat e_y to be rotated is associated with the complex number
z = x + iy.
Under these assumptions, the expression r(\theta) \cdot z is equivalent to R(\theta)\vec{v}.
Instead of the 4 coefficients of the matrix R(\theta), only \Re z and \Im z are needed.
From 2D to 3D
Quaternions generalize the ability of complex numbers to encode rotations in 3D. They were proposed by W. R. Hamilton (the one from the Hamiltonian) in 1843 precisely to extend ℂ (“invented” a few decades earlier), and their algebra is denoted by ℍ.
If a complex number z is formed by two coefficients (the real part \Re z and the imaginary part \Im z), a quaternion q \in \mathbb{H} is composed of four coefficients:
q = (q_0, q_1, q_2, q_3) = \bigl(q_0, \vec{q}\bigr),
The term q_0 is called the scalar part, while \vec{q} = (q_1\ q_2\ q_3) is the vector part.
Quaternion Product
The product p q of two quaternions is defined as follows:
p q = \begin{pmatrix} p_0 q_0 - p_1 q_1 - p_2 q_2 - p_3 q_3\\ p_1 q_0 + p_0 q_1 + p_2 q_3 - p_3 q_2\\ p_2 q_0 + p_0 q_2 + p_3 q_1 - p_1 q_3\\ p_3 q_0 + p_0 q_3 + p_1 q_2 - p_2 q_1 \end{pmatrix}.
This product satisfies all the properties of an associative algebra but is not commutative: p q \not= q p. (First algebra of this kind in history!).
It is easy (but boring) to prove that \forall q\not=0 \in \mathbb{H} there is one and only one q^{-1} such that qq^{-1} = 1.
Notation for Quaternions
Hamilton invented a very convenient notation for quaternions: q = q_0 + q_1 \mathbf{i} + q_2 \mathbf{j} + q_3 \mathbf{k}.
If the following rules are defined, the product between quaternions from the previous slide follows directly:
\begin{aligned} \mathbf{i} \mathbf{i} &= -1, &\mathbf{i} \mathbf{j} &= \mathbf{k}, &\quad\mathbf{j} \mathbf{i} = -\mathbf{k},\\ \mathbf{j} \mathbf{j} &= -1, &\mathbf{j} \mathbf{k} &= \mathbf{i}, &\quad\mathbf{k} \mathbf{j} = -\mathbf{i},\\ \mathbf{k} \mathbf{k} &= -1, &\mathbf{k} \mathbf{i} &= \mathbf{j}, &\quad\mathbf{i} \mathbf{k} = -\mathbf{j}. \end{aligned}
Inner Product
Like for complex numbers, quaternions have conjugates:
q^* = (q_0, -q_1, -q_2, -q_3) = (q_0, -\vec{q}).
It is possible to define an inner product between quaternions:
p \cdot q = p_0 q_0 + p_1 q_1 + p_2 q_2 + p_3 q_3 = p_0 q_0 + \vec{p} \cdot \vec{q}.
We can define a norm either through the inner product or through the conjugate:
\left\|q\right\|^2 = q \cdot q = qq^* = q_0^2 + q_1^2 + q_2^2 + q_3^2 = q_0^2 + \left\|\vec{q}\right\|^2.
3D Rotations with Quaternions
Given a normalized vector \hat n and an angle \theta, we associate with it the quaternion
r(\theta, \hat n) = \left(\cos\frac\theta2, \sin\frac\theta2\,\hat n\right),
which represents the rotation by an angle \theta around \hat n.
Note the similarity to the complex rotor e^{i\theta} = \cos\theta + i\sin\theta, but with \theta/2 instead of \theta.
If \left\|\hat n\right\| = 1, it obviously holds that \left\|r(\theta, \hat n)\right\| = 1.
Applying the Rotation
A generic vector \vec v is rotated into \vec v' through this product of three quaternions:
\vec v' = r(\theta, \hat n) \cdot (0, \vec v) \cdot r^{-1}(\theta, \hat n), where (0, \vec v) represents the quaternion associated with \vec v.
Intuitively, r(\theta, \hat n) appears twice in the formula because it depends on the angle \theta/2, and not simply on the angle \theta.
From the formula, it is evident that r(\theta, \hat n) and -r(\theta, \hat n) represent the same rotation (this property is called double cover).
Are Quaternions Efficient?
A rotation matrix must be stored by saving 9 coefficients in memory, while a quaternion requires only 4.
Should we therefore use quaternions to represent rotations in our code?
Generally no! If you explicitly write the sequence of operations needed to rotate a vector, you’ll see that the matrix representation requires fewer calculations. (But quaternions are faster to compose.)
What are quaternions useful for, then?
Slerp
Slerp (“Spherical Linear Interpolation”) interpolates r(t) between r_1 and r_2.
The formula for r(t) \in \mathbb{H} for t \in [0, 1] is simply
r(t) = \frac{\sin\bigl((1 - t)\theta\bigr)}{\sin\theta}r_1 + \frac{\sin (t\theta)}{\sin\theta}r_2,
where \theta is the “angle” between r_1 and r_2 (with \left\|r_1\right\| = \left\|r_2\right\| = 1):
\theta = \arccos r_1 \cdot r_2.
It is easy to show that r(t) represents a rotation \forall t\in [0, 1].
Example of Slerp
Animating Transformations
Representing rotations with quaternions fills the final gap, as all the transformations presented in the previous lesson can be easily interpolated:
- Translations;
- Scale transformations;
- Rotations 🥳.
The page Look, Ma, No Matrices! shows a nice example…
…which uses an extension of the concept of “quaternion”, multivectors, to generate the effects shown at the bottom of the page.
Let’s see then what multivectors and Clifford algebras are.
Clifford’s Algebras
Limits of Classical Geometry
Vectors and pseudovectors follow different transformation rules.
To describe rotations in a 2D plane, it is necessary to use 3D (pseudo)vectors, like angular momentum \vec{L} = \vec{r} \times \vec{p} or torque \vec{\tau} = \vec r \times \vec F.
The cross product only exists in \mathbb{R}^3 (and \mathbb{R}^7, due to octonions…).
The representation of rotations requires increasingly complicated algebras as the dimensions increase (complex numbers, quaternions…).
It is not possible to invert products between vectors: if \vec a \times \vec x = \vec b with \vec a and \vec b known and x an unknown vector, \vec x cannot be uniquely determined.
Geometric Algebra
Clifford algebras, and in particular geometric algebra, overcome all the problems listed in the previous slide.
It is a branch of mathematics that generalizes classical linear algebra and provides a more intuitive and coherent interpretation of certain geometric properties. Clifford proposed it in 1878.
Geometric algebra is the application of Clifford algebras to the case of \mathbb{R}^n, and is what usually interests physicists. We will limit ourselves to these.
The Outer Product (or Grassmann’s)
Product between Vectors
The problem with the cross product \times is that it is defined only on ℝ³, while we desire a general algebra!
In 1840, Hermann Günter Grassmann (1809–1877) defined the outer product \vec v \wedge \vec w between two vectors v and w (today also called the Grassmann product) as the oriented area on the plane \mathrm{Span}(\vec v, \vec w) with surface area
\left\|\vec v\right\|\,\left\|\vec w\right\|\,\sin\theta.
![]()

Oriented Areas
An oriented area like \vec v \wedge \vec w is called a bivector.
Bivectors are oriented just like ordinary vectors: changing the sign of a bivector means reversing its direction of travel (∧ is antisymmetric).
![]()
This is analogous to what happens with a vector: \vec v \rightarrow - \vec v.
Just as a vector \vec v does not depend on the point of application, a bivector does not depend on its perimeter («shape»).

«Shape» of the Outer Product

It may sound strange! However, this guarantees that (2\vec v) \wedge \vec w = \vec v \wedge (2\vec w).
Meaning of the Outer Product
This is the information encoded by an outer product \vec v \wedge \vec w:
- Magnitude of the surface (e.g., 15 m²);
- Orientation of the plane on which the surface lies;
- Orientation of the surface.
This information is not encoded:
- Shape of the surface;
- Position of the plane with respect to the origin of the axes.
It is possible to define scalar-bivector product and addition operations on bivectors: this makes them a vector space.
Scalar-Bivector Product
The expression \lambda \vec v \wedge \vec w with \lambda \in \mathbb{R} is still a bivector.
The area of \lambda \vec v \wedge \vec w is \left|\lambda\right| times the area of \vec v \wedge \vec w.
If \lambda < 0, the direction is reversed, otherwise it remains the same.
![]()

Sum of Bivectors

Basis of Bivectors
The sum appears geometrically complicated, but it enables the construction of a vector space.
Being a vector space, bivectors can be decomposed into a basis, and in this way the sum is trivial to understand: as simple as adding \vec v = 3\hat e_1 + 2\hat e_2 to \vec w = -2\hat e_1 + \hat e_2.
We can define the canonical basis as the set of the three bivectors of unit area on the xy, yz and xz planes:
\hat e_1 \wedge \hat e_2, \quad \hat e_2 \wedge \hat e_3, \quad \hat e_3 \wedge \hat e_1.
Basis of Bivectors
Sum of Bivectors
Once we define a basis, the sum can be trivially defined in terms of the usual vector sum: if we have two bivectors
\begin{aligned} \vec v &= 3 \hat e_1 \wedge \hat e_2 - \hat e_3 \wedge \hat e_1,\\ \vec w &= 2 \hat e_1 \wedge \hat e_2 + 4\hat e_3 \wedge \hat e_1,\\ \end{aligned}
then their sum is
\vec v + \vec w = 5\hat e_1 \wedge \hat e_2 + 3\hat e_3 \wedge \hat e_1.
It is therefore trivial to perform calculations with bivectors!
Vector Product
The outer product \vec u \wedge \vec v has some similarities with the classical cross product \vec u\times \vec v (we use the shorthand \hat e_j \wedge \hat e_k = \hat e_{jk}): \begin{aligned} \vec u \wedge \vec v &= (u_2 v_3 - u_3 v_2) \hat e_{23} + (u_3 v_1 - u_1 v_3) \hat e_{31} + (u_1 v_2 - u_2 v_1) \hat e_{12},\\ \vec u \times \vec v &= (u_2 v_3 - u_3 v_2) \hat e_1 + (u_3 v_1 - u_1 v_3) \hat e_2 + (u_1 v_2 - u_2 v_1) \hat e_3. \end{aligned}
However, they are not the same: the outer product returns an oriented area, while the cross product returns an axial vector (pseudovector).
Outer and Vector Product
Physical laws that employ the × product can be interpreted more intuitively if reformulated as laws combining oriented areas.
Moreover, the outer product has a number of advantages over the vector product:
- It is defined on \mathbb{R}^n for any n, while \times is only defined for n = 3.
- The outer product is associative, while the vector product is not: u \times (v \times w) \not= (u \times v) \times w. Calculations are therefore simpler.
Rotational Dynamics
The angular momentum can be defined as the bivector \vec L = \vec r \wedge \vec p:
![]()
Unlike the traditional definition (\vec L = \vec r \times \vec p), here \vec L represents an oriented section of a plane, which is intuitive: it is the plane on which the rotation takes place, and the orientation corresponds to the direction.

Reflections and Angular Momentum
Remember the image that illustrated the reflection of pseudovectors?
![]()
If L is a bivector, there is no problem! The plane on which the wheel rotates is perpendicular to the screen, and it is trivially reflected in the mirror.

Maxwell’s Equations
How can we fix the weirdness in the following plot?
![]()
Easy! We assume that \vec B is a bivector! (But \vec E is still a vector.)

Multivectors
Multivectors
The outer product can also be calculated between a bivector and a vector, and we can exploit the associative property:
\vec u \wedge \vec v \wedge \vec w = (\vec u \wedge \vec v) \wedge \vec w = \vec u \wedge (\vec v \wedge \vec w)
The trivector \vec u \wedge \vec v \wedge \vec w represents an oriented volume.
By repeatedly applying the outer product, we can generate trivectors, quadvectors, etc. (This is why it is called outer).
In general, we speak of multivectors, or k-vectors: a scalar is a 0-vector, vectors are 1-vectors, bivectors are 2-vectors, etc.
Examples
Consider for example multivectors in ℝ³ using the canonical basis \left\{\hat e_i\right\}, and the usual shortcut \hat e_{ij\ldots} = \hat e_i \wedge \hat e_j \wedge \ldots:
\begin{aligned} \hat e_{132} &= \hat e_1 \wedge (\hat e_3 \wedge \hat e_2) = -\hat e_1 \wedge (\hat e_2 \wedge \hat e_3) = -\hat e_{123},\\ \hat e_{231} &= -\hat e_{213} = \hat e_{123},\\ \hat e_{1233} &= \hat e_1 \wedge \hat e_2 \wedge (\hat e_3 \wedge \hat e_3) = 0,\\ \hat e_{1232} &= -\hat e_1 \wedge (\hat e_2 \wedge \hat e_2) \wedge \hat e_3 = 0.\\ \end{aligned}
From the last two examples, it is easy to see that the outer product of four elements of the basis is always zero in three dimensions.
Number of Multivectors
Not only is the outer product of four elements of the basis zero: even if we take any four vectors in \mathbb{R}^3, their product is zero.
It is trivial to show that in a space \mathbb{R}^n the maximum grade of multivectors is n.
Consequently, in \mathbb{R}^3 only the following objects are non-trivial:
- 0-vectors (scalars);
- 1-vectors (vectors);
- 2-vectors (bivectors), also called pseudovectors;
- 3-vectors (trivectors), also called pseudoscalars.
The Geometric Product
Birth of Geometric Algebra
Clifford started from Grassmann’s outer product to define a product between vectors, which makes the vector space \mathbb{R}^n an algebra.
Clifford’s brilliant idea was that the old, “classical” scalar product and Grassmann’s “new” outer product are intuitively related, because
\vec{v} \cdot \vec{w} \propto \cos\theta, \quad \vec{v} \wedge \vec{w} \propto \sin\theta,
and obviously \sin^2\theta + \cos^2\theta = 1, so it makes sense to combine them together.
Multiplication Tables
The fact that they complement each other can also be seen by comparing how the elements of the canonical basis of ℝ³ combine:
\begin{matrix} \cdot& e_1& e_2& e_3\\ e_1& 1& 0& 0\\ e_2& 0& 1& 0\\ e_3& 0& 0& 1 \end{matrix} \qquad\qquad \begin{matrix} \wedge& e_1& e_2& e_3\\ e_1& 0& e_1 \wedge e_2& e_1 \wedge e_3\\ e_2& -e_1 \wedge e_2& 0& e_2 \wedge e_3\\ e_3& -e_1 \wedge e_3& -e_2 \wedge e_3& 0 \end{matrix}
This does not “prove” that it’s meaningful to combine them together, but it’s surely suggestive.
Geometric Product
The geometric product is the sum of the inner product and the outer product:
\vec v\,\vec w = \vec v \cdot \vec w + \vec v \wedge \vec w.
This product is defined on \mathbb{R}^n, for any value of n \geq 1 (but the case n = 1 is trivial), because the outer product \vec v \wedge \vec w itself is easily generalizable to n dimensions.
The geometric product defines an associative algebra on the vector space.
Geometric Product
The «sum» must be understood in a non-literal sense, just like the sum of the real/imaginary parts (z = x + iy) or of orthogonal vectors (\vec v = 3\hat ı + 4\hat ȷ).
You can view the notation \vec v \cdot \vec w + \vec v \wedge \vec w as a mnemonic aid to remember how geometric products are added and multiplied.
Since \vec v \cdot \vec w \propto \cos\theta and \left\|\vec v \wedge \vec w\right\| \propto \sin\theta, it is reminiscent of
z = \left|z\right|\bigl(\cos\theta + i\sin\theta\bigr).
Combining n-vectors
The result of a geometric product between \vec v and \vec w is the sum of a scalar (\vec v \cdot \vec w) and a bivector (\vec v \wedge \vec w).
Following the same reasoning, one might want to add other objects together, like a scalar and a vector 3 + 2 \hat e_3.
In general, one can sum together different objects, getting a multivector: 6 - 2 \hat e_1 + 7 \hat e_{12}.
Existence of the Inverse
Let’s calculate \vec v^2 for a generic vector \vec v:
\vec v^2 = \vec v \vec v = \vec v \cdot \vec v + \vec v \wedge \vec v = \left\|\vec v\right\|^2 + 0 = \left\|\vec v\right\|^2.
This result implies that \vec v / \left\|\vec v\right\|^2 is the inverse of \vec v:
\vec v \frac{\vec v}{\left\|\vec v\right\|^2} = \frac{\vec v \vec v}{\left\|\vec v\right\|^2} = 1,
and therefore \vec v^{-1} = \vec v / \left\|\vec v\right\|^2: unlike dot and cross products, the inverse exists!
Other Examples
Suppose that \vec v and \vec w are orthogonal (\vec v \perp \vec w). Then
\vec v \vec w = \vec v \cdot \vec w + \vec v \wedge \vec w = \vec v \wedge \vec w.
For ⟂ vectors, the geometric product coincides with the outer product.
The canonical basis \left\{\hat e_i\right\} therefore has the following properties:
\hat e_i \hat e_i = \left\|\hat e_i\right\|^2 = 1, \quad \hat e_i \hat e_j = \hat e_i \wedge \hat e_j = -\hat e_j \wedge \hat e_i = - \hat e_j \hat e_i\ \text{if $i \not= j$}.
It’s customary to write \hat e_i \hat e_j using the shorthand \hat e_{ij}.
Products of Multivectors
We said that in \mathbb{R}^n there can be multivectors of degree up to n, because the outer product \wedge of n + 1 vectors vanishes.
What happens to the geometric product of four orthonormal vectors in \mathbb{R}^3?
\begin{aligned} \hat e_{1233} &= \hat e_1 \hat e_2 \hat e_3 \hat e_3 = \hat e_1 \hat e_2 (\hat e_3 \hat e_3) = \hat e_{12}\\ \hat e_{1232} &= \hat e_1 \hat e_2 (\hat e_3 \hat e_2) = -\hat e_1 \hat e_2 \hat e_2 \hat e_3 = -\hat e_1 (\hat e_2 \hat e_2) \hat e_3 = -\hat e_{13},\\ \hat e_{1231} &= \hat e_1 \hat e_2 (\hat e_3 \hat e_1) = -\hat e_1 \hat (e_2 \hat e_1) \hat e_3= (\hat e_1 \hat e_1) \hat e_2 \hat e_3 = \hat e_{23}. \end{aligned}
We always get bivectors!
Examples
If you know how to operate on the elements of \left\{\hat e_i\right\}, it is easy to perform calculations on arbitrary vectors. For example, given
\vec v = 2\hat e_1 + \hat e_2,\quad \vec w = -\hat e_2.
then
\begin{aligned} \vec v \vec w &= \bigl(2\hat e_1 + \hat e_2\bigr) \bigl(-\hat e_2\bigr) = 2\hat e_1 \hat e_2 - \hat e_2^2 = 2\hat e_{12} - 1,\\ \vec v^2 &= \vec v \vec v = \bigl(2\hat e_1 + \hat e_2\bigr) \bigl(2\hat e_1 + \hat e_2\bigr) =\\ &= 4\hat e_1^2 + \cancel{2 \hat e_{21}} + \cancel{2\hat e_{12}} + \hat e_2^2 = 5.\\ \end{aligned}
Geometric Algebra in 2D
General Multivector in 2D
In \mathbb{R}^2, one can only have 0-vectors (scalars), 1-vectors, and 2-vectors (bivectors).
The general form of a multivector is therefore
q = \alpha + \beta_1 \hat e_1 + \beta_2 \hat e_2 + \gamma \hat e_1 \hat e_2.
We have four degrees of freedom. How do its four components behave?
Sub-algebras
First, we note that from the expression
q = \textcolor{#2826a3}{\alpha} + \textcolor{#26a342}{\beta_1} \hat e_1 + \textcolor{#26a342}{\beta_2} \hat e_2 + \textcolor{#a34226}{\gamma} \hat e_{12}
it is possible to identify four subspaces (subalgebras):
- If only \textcolor{#2826a3}{\alpha} is nonzero, the subspace is isomorphic to \mathbb{R}.
- If only \textcolor{#26a342}{\beta_1} and \textcolor{#26a342}{\beta_2} are nonzero, it is isomorphic to the vector space \mathbb{R}^2.
- If only \textcolor{#a34226}{\gamma} is nonzero, the space is peculiar; elements like \gamma \hat e_{12} are called pseudoscalars.
Apart from these trivial cases, are there other interesting subalgebras?
Multivectors and ℂ
The pseudoscalar \hat e_{12} behaves like i!
\bigl(\hat e_{12}\bigr)^2 = \hat e_{1212} = -\hat e_{1221} = -1.
Let’s compare complex numbers and multivectors of the form \textcolor{#682673}{\alpha} + \textcolor{#734226}{\gamma} \hat e_{12}:
\begin{aligned} (3 + i) (1 - 2 i) &= 3 + i - 6 i + 2 = 5 - 5i,\\ (3 + \hat e_{12}) (1 - 2\hat e_{12}) &= 3 + \hat e_{12} - 6 \hat e_{12} - 2 \hat e_{1212} = 5 - 5 \hat e_{12}. \end{aligned}
They coincide! The algebra of multivectors of the form \textcolor{#682673}{\alpha} + \textcolor{#734226}{\gamma} \hat e_{12} is isomorphic to \mathbb{C}, and we set \hat e_{12} = I (uppercase!).
Multivectors and 2D Rotations
Let’s see an interesting way to write the geometric product:
\begin{aligned} \vec u \vec v &= \vec u \cdot \vec v + \vec u \wedge \vec v =\\ &= \left\|\vec u\right\| \cdot \left\|\vec v\right\| \cdot \cos\theta + \left\|\vec u\right\| \cdot \left\|\vec v\right\| \cdot \sin\theta \cdot \hat e_{12} =\\ &= \left\|\vec u\right\| \cdot \left\|\vec v\right\| \cdot \bigl(\cos\theta + I\sin\theta\bigr) \stackrel{\text{def.}}{\equiv} \left\|\vec u\right\| \cdot \left\|\vec v\right\| \cdot e^{I\theta}. \end{aligned}
If \left\|\vec u\right\| = \left\|\vec v\right\| = 1, this leads to \vec u \vec v = e^{I\theta}, the rotation by an angle \theta!
Multivectors and 2D Rotation
To rotate a vector \vec v by an angle θ around the origin, it is sufficient to consider two unit vectors \hat u_1 and \hat u_2, whose angle between them is θ, and calculate the rotated multivector \vec v' as
\vec v' = \hat u_1 \hat u_2 \vec v = e^{I\theta} \vec v = \left(\cos\theta + I \sin\theta\right) \vec v.
![]()
This formula is valid only in 2D, but it can be rewritten in a general form.

Alternative 2D Rotation
The product between two complex numbers commutes, and this is also true for 2D multivectors in the form \alpha + \hat e_1 \hat e_2 \beta.
However, in the formula \vec v' = e^{I\theta} \vec v the vector \vec v appears, which is not part of the subalgebra: in this case the product does not commute!
In 2D, z \vec v = \vec v z^* holds, where z^* is the complex conjugate.
Using these properties, we can rewrite the rotation operation into something similar to the one seen for quaternions:
\vec v' = e^{I\theta} \vec v = e^{I\theta/2} e^{I\theta/2} \vec v = e^{I\theta/2} \left(e^{I\theta/2} \vec v\right) = e^{I\theta/2} \vec v e^{-I\theta/2}.
Geometric Algebra in 3D
Multivectors in ℝ³
The most general multivector in ℝ³, expressed using the canonical basis \left\{\hat e_i\right\}, has this form:
\begin{aligned} &\textcolor{#2826a3}{\alpha} +\\ &\textcolor{#a32631}{\beta_1} \hat e_1 + \textcolor{#a32631}{\beta_2} \hat e_2 + \textcolor{#a32631}{\beta_3} \hat e_3 +\\ &\textcolor{#31a326}{\gamma_1} \hat e_{12} + \textcolor{#31a326}{\gamma_2} \hat e_{23} + \textcolor{#31a326}{\gamma_3} \hat e_{31} +\\ &\textcolor{#000000}{\delta} \hat e_{123}. \end{aligned}
We have eight degrees of freedom: 1 for scalars, 3 for vectors, 3 for bivectors, and 1 for trivectors (pseudoscalars). It still holds that (\hat e_{123})^2 = -1 \equiv I^2.
Rotations in 3D
In 3D, a rotation is specified by the angle and the axis of rotation. However, in GA you don’t specify the axis, but the plane of rotation: a bivector!
If the rotation plane is the normalized bivector \hat n, the vector \vec v rotates into \vec v' around the origin through
\vec v' = e^{\hat n \theta/2} \vec v e^{-\hat n \theta/2},
which is the expression we already saw in the 2D case, where \hat n = I = \hat e_{12}: the basis bivector lying in the complex plane.
We have a geometric interpretation of the classic complex rotor e^{i\theta}!
Quantum Mechanics
D. Hestenes, who rediscovered the works of Grassmann and Clifford in the 1960s-1970s, showed that the term i in the Schrödinger equation H \left|\psi\right> = i\hbar \frac{\mathrm{d}}{\mathrm{d}t} \left|\psi\right>, is related to the same rotation that represents spin in Dirac-Pauli theory.
It is only in a theory with electron spin that one can see why the wave function is complex […] spin is not a mere add-on in quantum mechanics, [and] was inadvertently incorporated into the original Schrödinger equation (Hestenes 2002)
Multivectors and Quaternions
It is easy to show that in 3D the following equalities hold:
(\hat e_{12})^2 = -1,\quad (\hat e_{23})^2 = -1,\quad (\hat e_{31})^2 = -1,
and therefore we can obtain a subalgebra that is isomorphic to the quaternion algebra ℍ by setting
\mathbf{i} = \hat e_{23}, \quad \mathbf{j} = \hat e_{13}\ \text{(sic!)},\quad \mathbf{k} = \hat e_{12}.
It turns out that the \vec q in q = (q_0, \vec q) is not a vector, but a bivector!
As it is easy to demonstrate, all the properties we listed continue to be valid.
Quantum Mechanics
The properties of bivectors in ℝ³ are the same that define the Pauli matrices, used to describe the coupling between spin and the electromagnetic field:
\sigma_1 = \begin{pmatrix}0& 1\\1& 0\end{pmatrix}, \quad \sigma_2 = \begin{pmatrix}0& -i\\i& 0\end{pmatrix}, \quad \sigma_3 = \begin{pmatrix}1& 0\\0& -1\end{pmatrix}.
From the perspective of geometric algebra, the gap between classical physics and quantum mechanics is reduced, because the latter is based on bivectors on the real field ℝ as in the case of classical mechanics (where, however, bivectors are much less pervasive).
GA calculations
Whenever you can implement a physical equation using the geometric product, you can use algebra on it.
This simplifies the calculations enormously, as you no longer need to decompose vectors in their components x, y, z and solve for each component separately, like it is usually done in classical textbooks.
An example of the complexity of the standard approach is shown in the next slides, taken from the book by R. Paknys “Applied frequency-domain electromagnetics”.
GA calculations
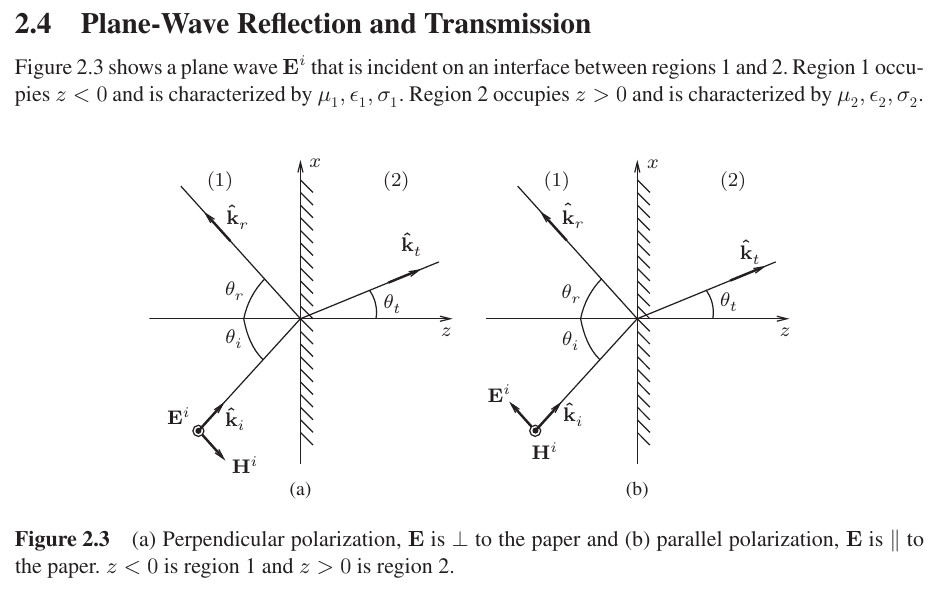
GA calculations
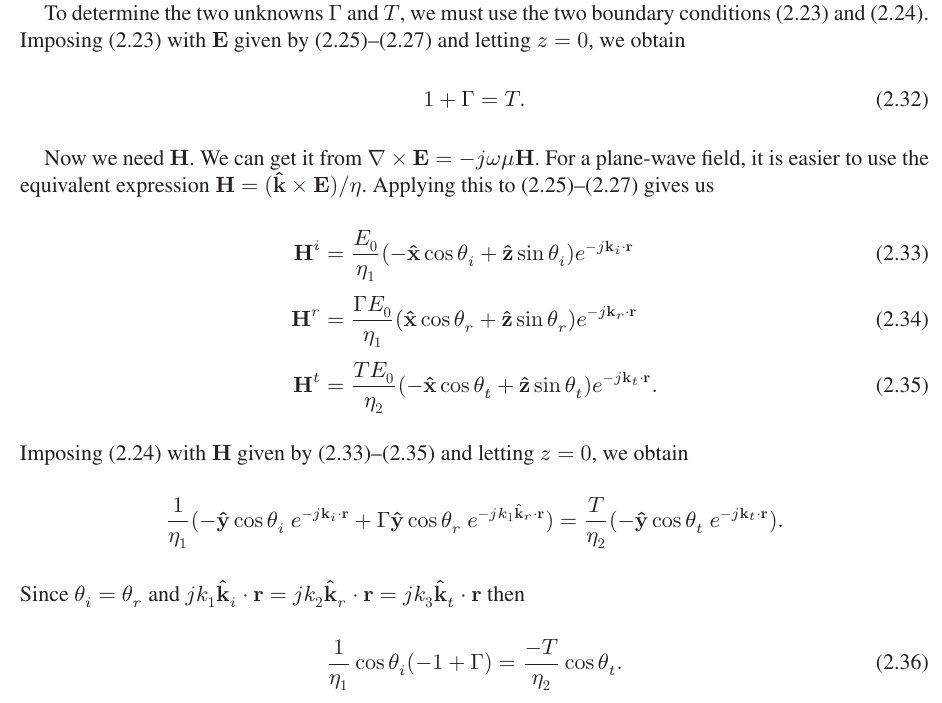
GA calculations
If you are curious, have a look at the paper The Earth is not flat (Vanderbei, 2008), which implements a model using classical geometry to estimate the radius of the Earth.
After having read and understood the paper, have a look at the same calculations done using GA: Sunset geometry (Merrill, 2016).
Merrill’s approach requires proficiency with GA calculation techniques, but it has two distinct advantages:
- No need to perform computations using sines and cosines;
- The relationships between angles come out naturally from the vectors, while in Vanderbei’s paper they must be derived by hand.
Beyond GA
Two interesting sub-branches of Geometric Algebras are:
Projective geometric algebras: By generalizing the implicit equation for 3D planes ax + by + cz + d = 0, one can derive the concept of point and direction using a 4D space. (Homogeneous coordinates originate from this framework.) See the video A Swift Introduction to Projective Geometric Algebra;
Conformal geometric algebras: These are a further generalization of projective geometric algebras that can represent any conformal transformation (i.e., a transformation that preserves relative angles) in 3D space using a 5D (!) versor t, so that any of these transformations is just v' = t v t^{-1}.
Multivectors and Ray Tracing?
Geometric algebra greatly simplifies the geometric equations needed in our course: scalars, vectors, planes, and volumes could be encoded by a single
Multivectortype, and transformations (rotations, translations, etc.) could be implemented only once: how wonderful!However, a multivector in ℝ³ requires 8 floating-point numbers to be stored: since ray tracers mostly use vectors, this is a waste (our
Vecstructure requires only 3 floating-point numbers).It is difficult (but not impossible) to implement efficient ray-tracing programs that use geometric algebra. A great reference is Geometric algebra for computer science (Dorst, 2007).
Further Reading (1/2)
A swift introduction to geometric algebra: I took a few ideas and diagrams from here (YouTube video, about 40 minutes).
Geometric Multiplication of Vectors (M. Josipović): it provides an intuitive idea of how geometric algebra works.
Geometric Algebra for Physicists (C. Doran, A. Lasenby): comprehensive introduction to GA and its applications to physics: classical mechanics, special relativity, electromagnetism, quantum mechanics, Lagrangian formalism, gravitation, etc.
Further Reading (2/2)
Understanding Geometric Algebra (K. Kanatani): more systematic than Josipović; it shows the link between homogeneous matrices and geometric algebra.
Geometric algebra for computer science (Dorst, 2007): great introduction to projective geometric algebras. It contains a full implementation of a C++ library.
A history of vector analysis (M. J. Crowe): this textbook describes the history of vector analysis, comparing the algebras of Hamilton, Grassmann/Clifford, and the vector system of Gibbs/Heaviside (which is the “classical” one, but it was born last).