Laboratory 5
Calcolo numerico per la generazione di immagini fotorealistiche
Maurizio Tomasi maurizio.tomasi@unimi.it
Our Program
With the addition of last week’s features, we are ready to release the first version of our program!
Currently, the program converts a PFM file into an LDR file (PNG, JPEG, etc.)
We will therefore release version 0.1.0.
GitHub allows you to release versions through a specific feature.
Pull Requests
How Git Works
We have been using Git for a few weeks, and we should have learned how it works.
In particular, we have seen that Git saves every code change (the commit) by linking it to the parent commit:
![]()
Today we will see that this linear structure can actually be more complicated.

Complex Changes
In the previous lessons, we implemented the code to read and write PFM files.
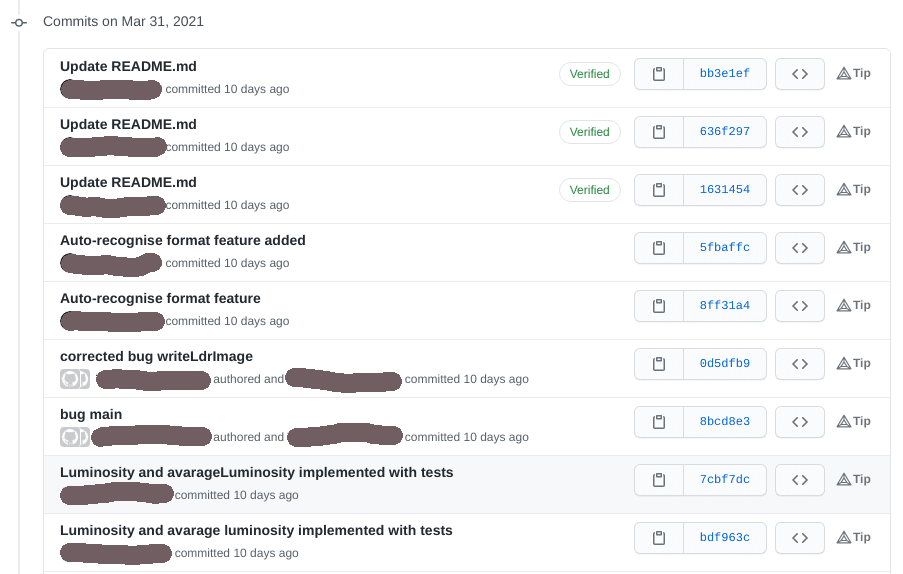
Each group implemented this functionality through a series of commits.
These commits were logically linked together, but this is not apparent when you open the commit page of any of your repositories (see the following slide).
Branches
Git implements the concept of a branch, which is a way to separate a sequence of commits from the main master “trunk”:
![]()
The
git branch NAMEcommand changes the active branch;git commitalways adds to the end of this branch.HEADalways points to the last commit of the active branch.

Branch Example
Branch Commands
git branchlists the available branches.git branch -d NAMEdeletes a branch (ok if you already merged it).git checkout -b NAMEcreates a new branch and makes it active.git checkout NAMEactivates the already existing branchNAME.git merge NAMEincorporates the changes from branchNAMEinto the current branch.git fetchandgit pullimport all branches.
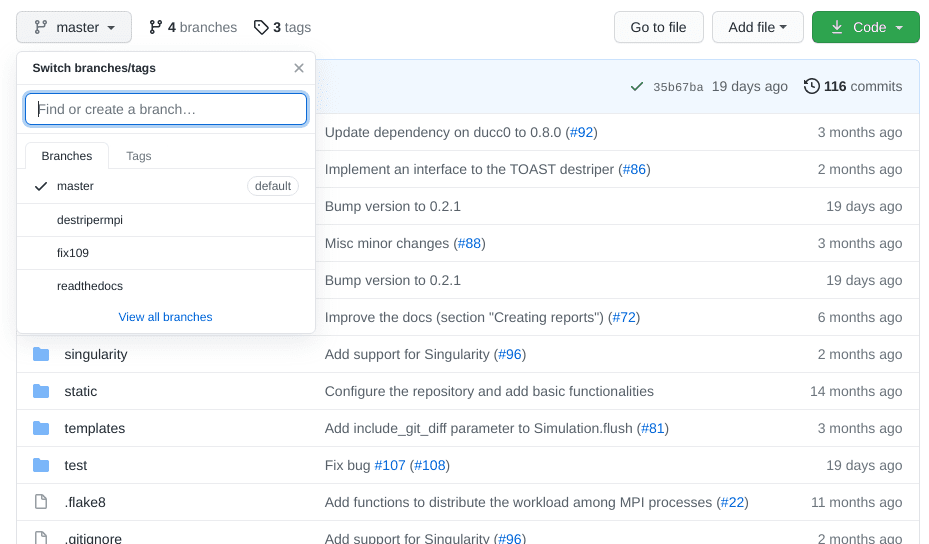
Branches in GitHub
GitHub allows you to activate any branch in the browser through a dedicated button:
![]()
The real power of branches, however, lies in pull requests.
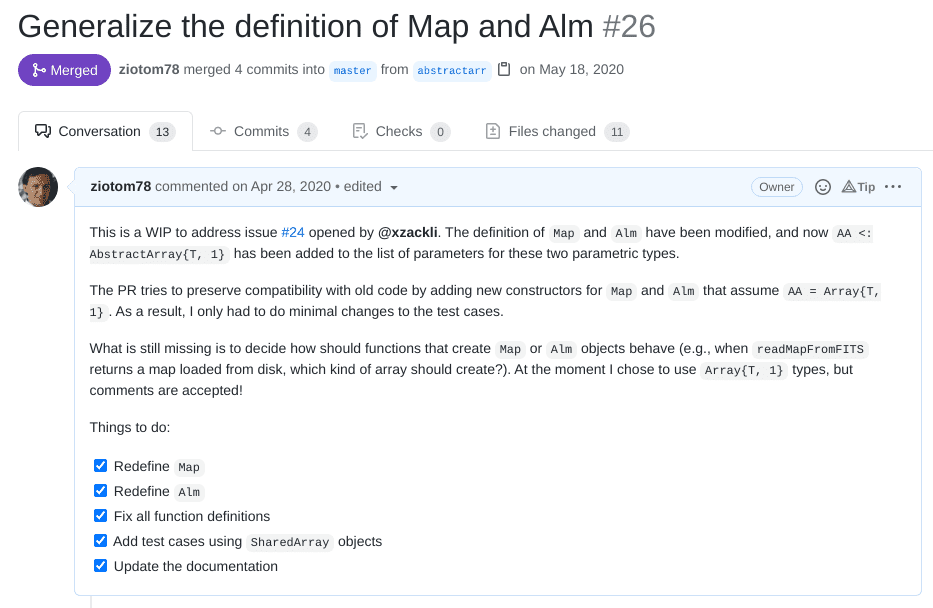
Pull Requests in GitHub
A pull request is a request to execute a
git mergecommand withinmaster.GitHub activates a forum for each pull request so that developers can comment on whether or not to perform the
git merge.When merging, it is possible (and recommended) to apply squashing, which consists of merging all commits into a single one.
Squashing is very useful for getting rid of the many commits with messages like “Small fixes”, “Oops I forgot to add this”, etc.
Pull Request Example
Checklists
In complex pull requests, you might plan to implement several different features with separate commits (highly recommended!)
The GitHub interface lets you include checklists with this syntax:
- [X] Add the feature - [ ] Implement tests - [ ] Update the documentationTo activate/deactivate items, just click on them without manually editing the Markdown source.
Checklists
How to Use Them in Practice
If one of you creates a pull request on GitHub, team members can contribute to the same pull request.
git fetch git checkout BRANCH_NAMEas if it were a branch they created themselves (
git fetchdownloads all new branches from GitHub, including pull requests).Pull requests are one of the fundamental features of GitHub!
Get used to using them for every “serious” modification of your code.
In job interviews, they often ask to see some of your PRs!
What to do today
What to do today
Start by “releasing” the 0.1.0 release of what you have written so far, and send the link of the GitHub repository to maurizio.tomasi@unimi.it
One of you should create a new pull request called
geometry, and the others should invokegit fetchfollowed bygit checkout geometry.In the
geometrybranch, implement these types (following Chapter 2 of Pharr, Jakobs & Humphreys):Vec(a three-dimensional vector).Point(a three-dimensional point).Normal(a normal vector).Transformation(a 4×4 matrix and its inverse).
Why Three Types?
It might seem redundant to have to define three types
Vec,Point,Normal: after all, their structures are identical!But this will make the compiler complain about meaningless operations, like summing two points.
In some ray-tracers, in fact, a single
Vectype is used to encode vectors, points, and normals (and even RGB colors!), but the use of distinct types will make our code more robust and clear.
Methods for Vec
- Conversion to string, e.g.,
Vec(x=0.4, y=1.3, z=0.7); - Comparison between vectors (for tests), using functions like
are_close; - Sum and difference between vectors;
- Product by a scalar and negation (
Vec.neg()returns -v); - Dot product between two vectors and cross product;
- Calculation of \left\|v\right\|^2
(
squared_norm) and of \left\|v\right\| (norm); - Function that normalizes the vector: v \rightarrow v / \left\|v\right\|;
- Function that converts a
Vecinto aNormal.
Refer to the tests in the pytracer
project (file test_all.py).
Methods for Point
- Conversion to string, e.g.,
Point(x=0.4, y=1.3, z=0.7); - Comparison between points (for tests);
- Sum between
PointandVec, returning aPoint; - Difference between two
Points, returning aVec; - Difference between
PointandVec, returning aPoint; - Conversion from
PointtoVec(Point.to_vec()).
Refer to the tests in the pytracer
project (file test_all.py).
Methods for Normal
- Conversion to string, e.g.,
Normal(x=0.4, y=1.3, z=0.7); - Comparison between normals (for tests);
- Negation of a normal (-\vec n);
- Multiplication by a scalar;
- Dot product
Vec·Normal; - Calculation of \left\|n\right\|^2
(
squared_norm) and of \left\|n\right\| (norm); - Function that normalizes the normal: n \rightarrow n / \left\|n\right\|.
Refer to the tests in the pytracer
project (file test_all.py).
Python Implementation
I will now briefly show how to implement the mathematical operations on
Point,VecandNormal.Be careful though: Python is a dynamic language, and allows you to do things that are not directly translatable into other languages.
This is evident in the implementation of methods that are very similar between
PointandVec, like the sum of two elements:Point+Vec→Point;Vec+Vec→Vec.
You can refer to the complete code of
pytracer(which we will also use in the coming weeks).
Python Implementation
def _are_xyz_close(a, b): # No need to tell if it's a Point, Vec, Normal…
# This works thanks to Python's duck typing. In C++ and other languages
# you should probably rely on function templates or similar tools
return are_close(a.x, b.x) and are_close(a.y, b.y) and are_close(a.z, b.z)
def _add_xyz(a, b, return_type):
# Ditto
return return_type(a.x + b.x, a.y + b.y, a.z + b.z)
def _sub_xyz(a, b, return_type):
# Ditto
return return_type(a.x - b.x, a.y - b.y, a.z - b.z)Python Implementation
@dataclass
class Vec:
x: float = 0.0
y: float = 0.0
z: float = 0.0
def is_close(self, other, epsilon=1e-5):
"""Return True if the object and 'other' have roughly the same direction and orientation"""
assert isinstance(other, Vec)
return _are_xyz_close(self, other, epsilon=epsilon)
def __add__(self, other):
"""Sum two vectors, or one vector and one point"""
if isinstance(other, Vec):
return _add_xyz(self, other, Vec)
elif isinstance(other, Point):
return _add_xyz(self, other, Point)
else:
raise TypeError(f"Unable to run Vec.__add__ on a {type(self)} and a {type(other)}.")
return _add_xyz(self, other, Vec)Other operations on Vec
def dot(self, other: "Vec") -> float:
return self.x * other.x + self.y * other.y + self.z * other.z
def squared_norm(self) -> float:
return self.x ** 2 + self.y ** 2 + self.z ** 2
def norm(self) -> float:
return math.sqrt(self.squared_norm())
def cross(self, other: "Vec") -> "Vec":
return Vec(x=self.y * other.z - self.z * other.y,
y=self.z * other.x - self.x * other.z,
z=self.x * other.y - self.y * other.x)
def normalize(self) -> "Vec":
norm = self.norm()
return Vec(self.x / norm, self.y / norm, self.z / norm)Transformations
We also need to implement the
Transformationtype, which encodes a transformation.We will only consider translations, rotations around the three coordinate axes, and scaling transformations: this will greatly simplify our work!
Transformations can be applied to three mathematical objects:
- Points (objects of type
Point); - Vectors (objects of type
Vec); - Normals (objects of type
Normal).
- Points (objects of type
The Transformation Type
It is often necessary to have both the matrix M (which implements the transformation) and its inverse M^{-1} readily available.
Our
Transformationtype will therefore need to store both matrices:class Transformation: def __init__(self, m=IDENTITY_MATR4x4, invm=IDENTITY_MATR4x4): self.m = m self.invm = invmwhere
IDENTITY_MATR4x4is a constant equal to the 4×4 identity matrix.
Consistency
Obviously, the fact that we have to pass both M and M^{-1} poses a consistency problem! How do we know that the two constructor parameters are correct?
We implement a method that verifies that the product of the two matrices yields the 4×4 identity matrix (useful in tests!):
def is_consistent(self): prod = _matr_prod(self.m, self.invm) return _are_matr_close(prod, IDENTITY_MATR4x4)where
_matr_prodand_are_matr_closeare simple methods that operate on 4×4 matrices.
Standard Transformations
We define a series of functions that construct
Transformationobjects, taking care to correctly initialize M and M^{-1}.For example, this is the implementation of
translation(translation by a vector \vec v):def translation(vec: Vec): # We are adopting the dumbest solution here. In your code, # it might be more convenient (and efficient) to define a # HomMatrix class instead of using explicit matrices… return Transformation( m=[[1.0, 0.0, 0.0, vec.x], [0.0, 1.0, 0.0, vec.y], [0.0, 0.0, 1.0, vec.z], [0.0, 0.0, 0.0, 1.0]], invm=[[1.0, 0.0, 0.0, -vec.x], [0.0, 1.0, 0.0, -vec.y], [0.0, 0.0, 1.0, -vec.z], [0.0, 0.0, 0.0, 1.0]], )
Inverse
We will see that it is often necessary to access the inverse of a transformation.
Fortunately, since we store both M and M^{-1}, this task is very easy:
Products
It is particularly critical to implement the functions to apply a transformation to a geometric object!
It will be necessary to implement the product operators on the
Point,Vec,Normaltypes:Transformation * Transformation → Transformation; when calculatinginvm, remember that (AB)^{-1} = B^{-1}A^{-1}.Transformation * Point → Point.Transformation * Vec → Vec.Transformation * Normal → Normal.
Points and Vectors
The difference between points and vectors lies in the last coefficient of the representation:
P = \begin{pmatrix} p_x\\ p_y\\ p_z\\ 1 \end{pmatrix}, \vec v = \begin{pmatrix} v_x\\ v_y\\ v_z\\ 0 \end{pmatrix}.
From a code perspective, it is better to implement two distinct functions for the product: the one for vectors can save iterating over the last column of the matrices M and M^{-1}.
Transformation of a Point
row0, row1, row2, row3 = self.m
newp = Point(x=p.x * row0[0] + p.y * row0[1] + p.z * row0[2] + row0[3],
y=p.x * row1[0] + p.y * row1[1] + p.z * row1[2] + row1[3],
z=p.x * row2[0] + p.y * row2[1] + p.z * row2[2] + row2[3])
w = p.x * row3[0] + p.y * row3[1] + p.z * row3[2] + row3[3]
if w == 1.0:
return newp # Avoid three (potentially costly) divisions when w = 1
else:
return Point(newp.x / w, newp.y / w, newp.z / w)Normalization
In the case where the last coefficient of the result is not equal to 1, it is necessary to normalize the other terms:
\begin{pmatrix} p_x\\ p_y\\ p_z\\ \lambda \end{pmatrix} \rightarrow \begin{pmatrix} p_x / \lambda\\ p_y / \lambda\\ p_z / \lambda\\ 1 \end{pmatrix}
(None of the transformations we implement lead to \lambda \not= 1, but more general transformations can: implementing this normalization in our code makes it future-proof).
Normals
We said that we also need to implement
Normal, which has the same structure asVecbut will require fewer operations:A transformation applied to a normal is identical to the application to a vector, but we must use the transpose of the inverse. Let’s see how to do the calculation.
Inverse Transpose
The homogeneous matrix M can be represented in block form:
M = \begin{pmatrix} \textcolor{#3434AD}{A}& \textcolor{#34AD34}{\vec v}\\ \mathbf{0}& 1, \end{pmatrix}
where \textcolor{#3434AD}{A} is a 3×3 matrix.
It can be easily shown that the inverse of a homogeneous matrix is still a homogeneous matrix.
Inverse Transpose
The transpose of a homogeneous matrix, however, is no longer homogeneous, because non-zero values appear in the last row:
M^t = \begin{pmatrix} \textcolor{#3434AD}{m_{11}}& \textcolor{#3434AD}{m_{21}}& \textcolor{#3434AD}{m_{31}}& 0\\ \textcolor{#3434AD}{m_{12}}& \textcolor{#3434AD}{m_{22}}& \textcolor{#3434AD}{m_{32}}& 0\\ \textcolor{#3434AD}{m_{13}}& \textcolor{#3434AD}{m_{23}}& \textcolor{#3434AD}{m_{33}}& 0\\ \textcolor{#34AD34}{v_1}& \textcolor{#34AD34}{v_2}& \textcolor{#34AD34}{v_3}& 1\\ \end{pmatrix}.
By explicitly calculating the product between the inverse transpose and a vector, we see that the last (homogeneous) coefficient is no longer 0!
However, this does not affect \hat n' (
n[3] == 0): we can therefore ignore the problem.
Implementation
It is inefficient to explicitly construct the transposed matrix of
self.invmand calculate the product of this with the normal.I suggest you implement the product between matrix and normal in the most direct way possible:
Matrices and Transformations
It may be useful to define a
HomMatrixtype that implements a 4×4 homogeneous matrix along with basic operations on it.The
Transformationtype will then contain twoHomMatrixfields, containing the transformation matrix and its inverse, respectively.Be careful to define
HomMatrixin a way that avoids memory allocation on the heap, because it needs to be fast to allocate:Avoid using constructs like
vector<vector<float>>(C++), as data would be in the heap and not contiguous in memory.In fact, avoid
vector(C++) and similar constructs altogether and define astd::arrayof 16 elements.
Tests
The complete set of tests is in the pytracer repository, in the file test_all.py.
Implement the same tests present in that file.
Teamwork
- One of you creates the 0.1.0 release;
- One of you creates a
geometrybranch and makes a pull request, which the others download; - Split the work among your co-workers. You need to implement the
types
Vec(without methods or operators!),Point,Normal,HomMatrix. - Synchronize with each other by doing a merge;
- Divide the implementation of the various methods and operators among
yourselves, and then implement
Transformation.
Hints for C++
Type definitions
- It’s crucial that
VecandPointbe efficient! - Don’t worry about defining classes with methods like
GetX/SetX: just defineVecandPointas plainstruct, orclasswith public membersx,y,z. - If your code does not use C++23 modules, define most (all?) of the
methods as
inlineby declaring them in the.hfile. This gives the C++ compiler many chances to optimize the code.
Not-recommended solution!
class Vec {
// These are "private" members (the default visibility in "class")
float x, y, z; // You can use "double", if you wish
public:
Vec(float _x = 0, float _y = 0, float _z = 0) : x{_x}, y{_y}, z{_z} {}
Vec(const Vec &); // Copy constructor; here it is unnecessary!
Vec(const Vec &&); // Move constructor; ditto!
float getx() const { return x; }
void setx(float _x) { x = _x; }
// Etc.
};Recommended solution
struct Vec { // With "struct", everything is "public" by default
// Defaults can be provided inline!
float x{0.0}, y{0.0}, z{0.0};
};I suggested this approach when you implemented Color,
but it is even more important to follow the advice today, as the number
of classes to implement is growing quickly!
Avoiding repetitions
You can use C++ templates to avoid defining over and over the same operations on
PointandVectypes.This example shows how to apply the technique to the sum of two elements:
// Generic operation `In1 + In2 → Out`. This template… template <typename In1, typename In2, typename Out> Out _sum(const In1 &a, const In2 &b) { return Out{a.x + b.x, a.y + b.y, a.z + b.z}; } Point operator+(const Point &a, const Vec &b) { return _sum<Point, Vec, Point>(a, b); // …is used here… } Vec operator+(const Vec &a, const Vec &b) { return _sum<Vec, Vec, Vec>(a, b); // …and here }
Hints for C#
Type Definition
- Since
Vec,Point,NormalandTransformationwill be heavily used in calculations, it is important that they be extremely efficient classes. - This is therefore a case where it is better to define the types as
value types using
structinstead ofclass. - Unfortunately, C# does not support metaprogramming, so you will have to define common operations like additions multiple times
Hints for Julia
Type definitions
- To define the
VecandPointtypes you might think that StaticArrays.jl is perfect. It’s a very efficient library, but I don’t recommend using it in this case. - The problem with StaticArrays.jl is that it doesn’t allow you to
exploit multiple dispatch:
VecandPointwould be seen by Julia as the same typeSVector{3, Float32}. - It’s better to define two new types with
struct - I recommend omitting
mutable: you will encourage Julia to use them as value types instead of reference types.
Guidelines for D/Nim/Rust
Type Definitions
You can draw inspiration from the implementations in the document A comparison between a few programming languages.
This could be a good opportunity to reduce code duplication by leveraging the metaprogramming capabilities of your language…
…but if you find them difficult to use, don’t overcomplicate things and just use duplicated code!
I’ll show an example with Nim: similar results can be achieved with Rust and D.
Defining Types with Nim
We want to implement a series of operations on
Vec,Point,Normal.Nim supports operator overloading, so we could write:
proc `+`(a: Point, b: Vec): Point = # Point + Vec → Point result.x = a.x + b.x result.y = a.y + b.y result.z = a.z + b.z proc `+`(a: Vec, b: Vec): Vec = # Vec + Vec → Vec # The implementation is the same as above! result.x = a.x + b.x result.y = a.y + b.y result.z = a.z + b.zbut this is very tedious!
Metaprogramming
To avoid repetition in the definition of
+, we can use metaprogramming, which is code that is not executed when the program is launched, but while the program is being compiled.Nim supports three different constructs that implement metaprogramming:
Let’s see what they consist of: this way you can then search the documentation of your language to see if similar paradigms are supported.
Generic Functions
A generic function does not specify a precise type for its data.
It is useful when the operations you want to perform need to be adaptable to any type (like template functions in C++):
It is not suitable in our case, because we want to specify constraints on
T(for example, you cannot add two points together!).
Templates
A template is a piece of code where some parts are not specified and can be substituted later as needed.
Here is an example:
template define_double_proc(fname: untyped, t: typedesc) = proc fname(arg: t): t = result = arg + arg define_double_proc(double_int, int) # A function that defines another function! 😲 define_double_proc(double_float32, float32)I have defined two new functions,
double_intanddouble_float32, but I have not specified an equivalent forfloat64or foruint.
Macros
A macro is a sequence of instructions that generate code piece by piece.
It is the most sophisticated metaprogramming paradigm available in Nim.
It can be used to do amazing things (for example, modify the language to support more OOP constructs).
However, I advise caution, as macros can be difficult to debug and the generated code can be unreadable.
A good way to understand how to use macros is to first practice with a LISP language (Racket, Clojure, Scheme…).
Templates in Nim
What we need to quickly define mathematical operations on multiple types are obviously templates:
Templates in Nim (2/2)
We can go further and make the approach extensible to the type of operation as well, so that the template can also be used for subtraction:
template define_3dop(fname: untyped, type1: typedesc, type2: typedesc, rettype: typedesc) =
proc fname*(a: type1, b: type2): rettype =
result.x = fname(a.x, b.x) # This works because "a + b" is interpreted as `+`(a, b)
result.y = fname(a.y, b.y)
result.z = fname(a.z, b.z)
define_3dop(`+`, Vec, Vec, Vec)
define_3dop(`-`, Vec, Vec, Vec)
define_3dop(`+`, Vec, Point, Point)
define_3dop(`+`, Point, Vec, Point)
define_3dop(`-`, Point, Vec, Point)
define_3dop(`+`, Normal, Normal, Normal)
define_3dop(`-`, Normal, Normal, Normal)Templates in D
D provides mixin template, which can be exploited to avoid
duplications in several methods of Vec, Point,
and Normal:
mixin template defSumDiff(T, Ret) {
Ret opBinary(string op)(T other) const
if (op == "+" || op == "-") {
// This is a string mixin, so that we can handle both + and - in the same code
return mixin("Ret(x " ~ op ~ " other.x, y " ~ op ~ "other.y, z " ~ op ~ " other.z)");
}
}
struct Vec {
float x, y, z;
mixin defSumDiff!(Vec, Vec);
}
struct Point {
float x, y, z;
mixin defSumDiff!(Vec, Point);
}Templates in Rust?
Unfortunately, Rust does not have anything equivalent to Nim’s templates and D’s mixins. You must use macros!
Do not try to be too smart trying to combine
AddandSub!macro_rules! implement_sum( ($type1:ty, $type2:ty, $return_type:tt) => { impl ops::Add<$type2> for $type1 { type Output = $return_type; fn add(self: $type1, other: $type2) -> $return_type { let result = $return_type{x: self.x + other.x, y: self.y + other.y, z: self.z + other.z}; result } } } ); implement_sum!(Vec, Vec, Vec); implement_sum!(Point, Vec, Point);